










.png)

Thiết Bị Định Vị Tàu Biển - MarineZone
XEM CHI TIẾT Ở PHẦN DƯỚI CỦA TRANG !
.png)
NGR 3000 - MarineZone
Khái niệm và nền tảng kỹ thuật của định vị vệ tinh tàu biển
Định vị vệ tinh tàu biển là hạ tầng cốt lõi của hệ thống điều hướng hiện đại, cho phép tàu xác định chính xác vị trí (position), vận tốc (speed over ground – SOG), hướng chuyển động (course over ground – COG) và thời gian chuẩn UTC với độ chính xác cao trong mọi điều kiện khai thác, từ vùng nước ven bờ đến đại dương xa bờ. Về mặt kỹ thuật, hệ thống này dựa trên các chòm vệ tinh định vị toàn cầu (GNSS – Global Navigation Satellite System) như GPS (Mỹ), GLONASS (Nga), Galileo (EU), BeiDou (Trung Quốc) và các hệ thống tăng cường như SBAS (Satellite Based Augmentation System).

Trong kiến trúc tổng thể, một hệ thống định vị vệ tinh tàu biển tiêu chuẩn bao gồm:
- Antenna GNSS hàng hải: lắp đặt trên cao, tầm nhìn trời rộng, tối ưu hóa để giảm đa đường (multipath), chống nước, chống ăn mòn muối biển, có bộ khuếch đại nhiễu thấp (LNA) tích hợp.
- Bộ thu – bộ định vị GNSS (GNSS navigator): thực hiện thu, giải điều chế, xử lý tín hiệu vệ tinh, tính toán nghiệm vị trí, vận tốc, thời gian, đồng thời giám sát chất lượng và độ tin cậy của nghiệm.
- Khối giao tiếp và tích hợp: xuất dữ liệu theo chuẩn NMEA 0183/IEC 61162, RS422, Ethernet… để cung cấp cho radar, AIS, ECDIS, autopilot, INS, VDR và các hệ thống giám sát – điều khiển khác trên buồng lái.
Về nguyên lý, bộ thu GNSS trên tàu đo thời gian truyền của tín hiệu từ nhiều vệ tinh đến antenna, từ đó suy ra khoảng cách giả (pseudorange). Bằng cách giải hệ phương trình với ít nhất 4 vệ tinh, thiết bị tính được ba thành phần tọa độ 3D (kinh độ, vĩ độ, cao độ) và sai số đồng hồ, sau đó chuyển đổi sang các hệ tọa độ hàng hải như WGS‑84, hiển thị trên ECDIS hoặc hải đồ điện tử. Các thuật toán lọc Kalman, bình phương tối thiểu có trọng số, kết hợp với mô hình quỹ đạo và đồng hồ vệ tinh, được sử dụng để tối ưu nghiệm vị trí theo thời gian thực.
Về bản chất, khi người vận hành nhắc đến các khái niệm như GPS tàu biển, thiết bị định vị tàu biển, máy định vị hàng hải, phần lớn đang nói đến các bộ thu GNSS hàng hải chuyên dụng. Các thiết bị này không chỉ đơn thuần là “máy GPS” dân dụng mà là một thành phần của hệ thống điều hướng tích hợp, được thiết kế để đáp ứng các yêu cầu khắt khe về an toàn hàng hải, độ tin cậy và tính sẵn sàng cao.
Về thiết kế cơ khí và môi trường, GNSS hàng hải phải:
- Chịu được rung động liên tục, gia tốc do sóng, lắc ngang – dọc của tàu, theo các tiêu chuẩn thử nghiệm rung IEC/IMO.
- Đạt cấp bảo vệ chống nước, chống bụi (thường IP66/IP67 trở lên), vỏ chống ăn mòn, phù hợp môi trường muối biển.
- Hoạt động ổn định trong dải nhiệt độ rộng, chịu được bức xạ mặt trời, sương muối, gió mạnh.
- Đáp ứng các tiêu chuẩn quốc tế như IMO, IEC, MED, đăng kiểm (DNV, ABS, LR…), đảm bảo tương thích với các hệ thống an toàn bắt buộc trên tàu.
Khác với thiết bị GPS dân dụng dùng trên ô tô hoặc thiết bị cầm tay, định vị vệ tinh tàu biển không chỉ hiển thị tọa độ đơn lẻ trên màn hình. Thiết bị phải đảm bảo một chuỗi yêu cầu kỹ thuật mang tính hệ thống, bao gồm độ chính xác, tính liên tục, tính toàn vẹn (integrity) và tính sẵn sàng (availability) của dịch vụ định vị.
Cung cấp dữ liệu liên tục với chu kỳ cập nhật ngắn (thường 1 giây, thậm chí 0,5 giây đối với một số ứng dụng điều động tinh). Điều này cho phép:
- Radar overlay hải đồ hiển thị chính xác vị trí tàu theo thời gian thực, hạn chế sai lệch khi tránh va.
- AIS phát thông tin vị trí, SOG, COG ổn định, tránh “nhảy” vị trí gây hiểu nhầm cho tàu khác.
- Autopilot và hệ thống điều khiển hướng sử dụng dữ liệu COG/SOG mượt, không gây dao động điều khiển.
- Hệ thống ghi dữ liệu hành trình (VDR) lưu lại track tàu với độ phân giải thời gian đủ chi tiết để phục vụ điều tra tai nạn.
Kiểm tra độ tin cậy của vị trí thông qua các cơ chế integrity như RAIM (Receiver Autonomous Integrity Monitoring). RAIM sử dụng dư thừa vệ tinh (nhiều hơn 4 vệ tinh) để kiểm tra tính nhất quán của các phép đo pseudorange, phát hiện vệ tinh “lỗi” hoặc dữ liệu bất thường. Một số bộ thu hàng hải cao cấp còn hỗ trợ:
- Fault Detection (FD): phát hiện sai lệch và cảnh báo cho người vận hành khi nghiệm vị trí không còn đáng tin cậy.
- Fault Detection and Exclusion (FDE): tự động loại bỏ vệ tinh gây lỗi khỏi nghiệm, duy trì chất lượng định vị mà không cần can thiệp thủ công.
- Tích hợp tín hiệu từ nhiều chòm vệ tinh (multi‑GNSS) để tăng số vệ tinh khả dụng, cải thiện khả năng RAIM và giảm nguy cơ mất integrity.
Tương thích chuẩn giao tiếp hàng hải là yêu cầu bắt buộc để GNSS có thể “nói chuyện” với các thiết bị khác trên buồng lái. Các chuẩn phổ biến gồm:
- NMEA 0183 / IEC 61162‑1: giao thức nối tiếp dạng câu (sentence) như GGA, RMC, VTG, GLL…, truyền qua RS422/RS232. Mỗi câu chứa thông tin vị trí, thời gian, vận tốc, hướng… ở dạng ASCII.
- IEC 61162‑2: mở rộng cho tốc độ truyền cao hơn, phục vụ các ứng dụng yêu cầu băng thông lớn.
- Giao tiếp vật lý RS422: chống nhiễu tốt, phù hợp môi trường điện từ phức tạp trên tàu, cho phép kéo cáp dài giữa GNSS và các thiết bị khác.
Tích hợp sâu với radar, AIS, ECDIS, autopilot, INS, BAM trên buồng lái là đặc trưng của kiến trúc bridge hiện đại. Một bộ thu GNSS hàng hải thường đóng vai trò “nguồn tham chiếu” cho:
- Radar: sử dụng vị trí GNSS để vẽ vị trí tàu trên màn hình, kết hợp với ảnh radar tạo lớp overlay trên hải đồ điện tử.
- AIS: phát thông tin vị trí, SOG, COG, thời gian cho các tàu khác và trạm bờ, hỗ trợ tránh va và giám sát giao thông hàng hải.
- ECDIS: hiển thị track tàu trên hải đồ, tính toán route, cảnh báo chệch tuyến, cảnh báo cạn, vùng cấm.
- Autopilot: sử dụng COG/SOG để điều khiển hướng theo tuyến đặt trước, giảm tải cho sỹ quan trực ca.
- INS (Inertial Navigation System): kết hợp dữ liệu quán tính (gyro, accelerometer) với GNSS để duy trì định vị khi tín hiệu vệ tinh suy giảm hoặc bị che khuất.
- BAM (Bridge Alert Management): nhận cảnh báo mất tín hiệu, suy giảm accuracy, mất integrity từ GNSS và phân loại, hiển thị cảnh báo tập trung cho sỹ quan.
Trong kiến trúc bridge hiện đại, định vị tàu biển đóng vai trò nguồn dữ liệu trung tâm, tương tự “đồng hồ chuẩn” cho toàn bộ hệ thống điều hướng. Mọi sai lệch, gián đoạn hoặc suy giảm chất lượng tín hiệu GNSS đều có thể lan truyền sang toàn bộ hệ thống, gây ra chuỗi hệ quả kỹ thuật:
- Sai lệch vị trí trên ECDIS: tàu có thể bị hiển thị lệch so với luồng thực tế, dẫn đến nguy cơ đi chệch tuyến, xâm nhập vùng nước cạn hoặc khu vực hạn chế mà sỹ quan không nhận ra kịp thời.
- Dữ liệu AIS không chính xác: vị trí, SOG, COG phát đi bị sai, gây hiểu nhầm cho tàu xung quanh, làm giảm hiệu quả tránh va dựa trên AIS.
- Autopilot điều khiển sai: nếu autopilot dựa trên COG/SOG từ GNSS, sai số lớn hoặc dữ liệu gián đoạn có thể làm hệ thống điều khiển hướng không ổn định, tăng dao động hoặc lệch tuyến.
- Radar overlay bị lệch: lớp overlay hải đồ – radar không trùng khớp, khiến sỹ quan khó đối chiếu mục tiêu radar với vị trí trên hải đồ, đặc biệt nguy hiểm khi đi luồng hẹp, vùng nước hạn chế.
- INS không được hiệu chỉnh: nếu GNSS không cung cấp được cập nhật định kỳ, INS sẽ trôi dần (drift), làm sai lệch nghiệm vị trí tổng hợp.
Trong các tình huống khai thác phức tạp như cập cảng, đi luồng hẹp, điều động trong vùng nước hạn chế, yêu cầu về độ chính xác và độ tin cậy của định vị vệ tinh tàu biển càng trở nên nghiêm ngặt. Nhiều tàu sử dụng thêm các kỹ thuật tăng cường như:
- DGPS / DGNSS: sử dụng trạm tham chiếu mặt đất phát hiệu chỉnh sai số, nâng cao độ chính xác vị trí xuống mức mét hoặc dưới mét.
- SBAS: nhận hiệu chỉnh qua vệ tinh (EGNOS, WAAS, MSAS…), cải thiện accuracy và integrity trên vùng phủ sóng.
- Multi‑GNSS: khai thác đồng thời GPS, GLONASS, Galileo, BeiDou để tăng số vệ tinh quan sát, cải thiện hình học định vị (DOP) và khả năng duy trì dịch vụ trong điều kiện che khuất một phần bầu trời.
Vì vai trò trung tâm đó, thiết kế hệ thống định vị vệ tinh tàu biển trên tàu thường tuân theo nguyên tắc redundancy (dự phòng): lắp đặt ít nhất hai bộ thu GNSS độc lập, antenna tách biệt, tuyến cáp riêng, cấp nguồn từ các mạch khác nhau. Dữ liệu từ các nguồn này được so sánh chéo trên ECDIS hoặc INS; khi phát hiện sai lệch bất thường, sỹ quan có thể nhanh chóng xác định nguồn lỗi và chuyển sang nguồn dự phòng, giảm thiểu rủi ro mất định vị trong các tình huống quan trọng.
GPS, GNSS và vai trò trong định vị tàu biển
GPS giữ vai trò nền tảng trong định vị vệ tinh tàu biển, cung cấp vị trí 3D và thời gian chuẩn cho ECDIS, AIS, DP, autopilot… Tuy nhiên, việc chỉ dựa vào một chòm vệ tinh khiến hệ thống dễ bị ảnh hưởng bởi che khuất, điều kiện tầng điện ly, giảm số vệ tinh “healthy” và nhiễu, dẫn tới nguy cơ mất fix hoặc suy giảm độ chính xác. Sự phát triển của multi-GNSS với GPS, GLONASS, BeiDou và Galileo giúp tăng số vệ tinh quan sát, cải thiện hình học DOP, bù trừ sai số ionosphere đa tần, đồng thời nâng cao khả năng giám sát tính toàn vẹn. Khi kết hợp với SBAS/DGNSS, RTK và INS/IMU, định vị vệ tinh tàu biển đạt độ chính xác từ mét đến centimet, đáp ứng yêu cầu khắt khe của hàng hải hiện đại.
GPS trong hàng hải – nền tảng nhưng không còn đơn lẻ
GPS (Global Positioning System) là hệ thống vệ tinh định vị do Hoa Kỳ xây dựng, gồm chùm vệ tinh quỹ đạo trung bình (MEO) phát tín hiệu thời gian và quỹ đạo (ephemeris) xuống mặt đất. Mỗi vệ tinh GPS mang theo đồng hồ nguyên tử có độ ổn định rất cao, phát các tín hiệu mã hóa trên nhiều tần số (L1, L2, L5…) chứa thông tin về thời gian phát và tham số quỹ đạo. Bộ thu trên tàu đo thời gian truyền tín hiệu từ nhiều vệ tinh, từ đó tính khoảng cách giả (pseudorange) và giải bài toán hình học để suy ra vị trí 3D (vĩ độ, kinh độ, độ cao) và thời gian chuẩn GNSS.
Trong giai đoạn đầu, định vị tàu biển chủ yếu dựa trên GPS với cấu hình một tần số (single-frequency) và số lượng vệ tinh hạn chế. Độ chính xác điển hình ở mức vài mét đến chục mét, phụ thuộc vào điều kiện lan truyền tín hiệu và hình học vệ tinh. Tuy nhiên, phụ thuộc hoàn toàn vào một hệ thống vệ tinh duy nhất khiến độ sẵn sàng và ổn định có thể bị ảnh hưởng trong một số kịch bản vận hành thực tế, đặc biệt với các tàu hoạt động cường độ cao, yêu cầu liên tục dữ liệu vị trí để phục vụ ECDIS, radar overlay, VTS, AIS, DP (Dynamic Positioning)…
- Khu vực có che khuất địa hình, công trình, giàn khoan, cầu cảng làm giảm số vệ tinh nhìn thấy, gây tăng HDOP/PDOP và có thể mất fix 3D. Trên tàu container cao tầng, cấu trúc siêu cao (superstructure) cũng có thể che khuất một phần bầu trời, khiến bộ thu GPS khó duy trì số vệ tinh tối thiểu.
- Điều kiện ionosphere, troposphere bất lợi gây trễ tín hiệu, làm sai lệch khoảng cách đo được. Với bộ thu một tần số, sai số do tầng điện ly (ionospheric delay) khó được bù chính xác, dẫn đến sai số vị trí tăng lên, đặc biệt ở vĩ độ cao hoặc trong giai đoạn bão từ.
- Giảm số vệ tinh khả dụng tại một thời điểm nhất định do cấu hình chòm vệ tinh, bảo trì vệ tinh, hoặc các sự kiện kỹ thuật. Khi số vệ tinh “healthy” giảm xuống gần ngưỡng tối thiểu (4 vệ tinh cho nghiệm 3D + thời gian), nghiệm định vị trở nên nhạy với nhiễu và sai số đo.
Trong môi trường hàng hải hiện đại, các hệ thống như ECDIS, autopilot, hệ thống DP, VDR, AIS yêu cầu nguồn dữ liệu vị trí liên tục, ổn định, có khả năng giám sát tính toàn vẹn (integrity). Vì vậy, xu hướng hiện nay là chuyển từ “GPS-only” sang multi-GNSS, tận dụng đồng thời nhiều chùm vệ tinh để tăng độ tin cậy, cải thiện hình học vệ tinh, giảm nguy cơ mất fix và nâng cao khả năng chống nhiễu, chống che khuất cục bộ.
Trong kiến trúc thiết bị hàng hải, bộ thu GPS thường được tích hợp trong:
- Hệ thống định vị độc lập (standalone GNSS receiver) xuất NMEA 0183/IEC 61162 cho các thiết bị khác.
- Module GNSS tích hợp trong AIS Class A/B, VDR, EPIRB, SSAS, LRIT.
- Hệ thống DP (Dynamic Positioning) sử dụng GNSS như một trong các sensor chính, kết hợp với gyrocompass, MRU/IMU, taut wire, hydroacoustic positioning.
Trong các ứng dụng yêu cầu độ chính xác cao hơn (như cập cảng, neo đậu chính xác, hoạt động ngoài khơi gần giàn khoan), GPS thường được kết hợp với các kỹ thuật tăng cường như SBAS (Satellite-Based Augmentation System), DGPS (Differential GPS) hoặc RTK (Real-Time Kinematic) để giảm sai số xuống mức decimet hoặc centimet. Tuy nhiên, ngay cả trong các cấu hình tăng cường này, việc chỉ dựa trên một chòm vệ tinh vẫn là điểm yếu về mặt khả dụng và tính bền vững lâu dài.
GNSS – hệ thống định vị vệ tinh toàn cầu đa chùm
GNSS (Global Navigation Satellite System) là khái niệm tổng quát bao trùm tất cả các hệ thống vệ tinh định vị toàn cầu. Trong định vị vệ tinh tàu biển, các hệ GNSS phổ biến gồm:
- GPS – Hoa Kỳ, với cấu trúc nhiều mặt phẳng quỹ đạo MEO, cung cấp dịch vụ SPS (Standard Positioning Service) cho dân sự và PPS (Precise Positioning Service) cho quân sự.
- GLONASS – Liên bang Nga, sử dụng cấu hình quỹ đạo khác GPS, tần số phát theo dạng FDMA/CDMA kết hợp, giúp tăng đa dạng tần số và cải thiện khả năng chống nhiễu cục bộ trên một dải tần.
- BeiDou – Trung Quốc, là hệ thống lai giữa vệ tinh MEO, GEO và IGSO, cung cấp dịch vụ định vị khu vực và toàn cầu, có các tín hiệu dân sự B1, B2, B3 với cấu trúc mã hiện đại.
- (Tùy thiết bị có thể hỗ trợ thêm Galileo – EU, hệ thống GNSS thế hệ mới với tín hiệu đa tần, thiết kế tối ưu cho độ chính xác và tính toàn vẹn, đặc biệt hữu ích cho các ứng dụng hàng hải yêu cầu độ tin cậy cao.)
Các bộ thu GNSS hàng hải hiện đại được thiết kế để:
- Thu đồng thời nhiều hệ vệ tinh (GPS + GLONASS + BeiDou…) trên nhiều tần số, cho phép bù trừ sai số ionosphere bằng kỹ thuật đo đa tần (dual-frequency, triple-frequency) và tăng số vệ tinh quan sát được tại mọi thời điểm.
- Theo dõi nhiều vệ tinh song song với hàng chục đến hàng trăm kênh thu độc lập, đảm bảo luôn có đủ vệ tinh “healthy” cho nghiệm định vị 3D, kể cả trong môi trường đô thị ven biển, cảng biển có cần cẩu, cầu cảng, giàn khoan, hoặc khi tàu quay trở, đổi hướng liên tục.
- Tự động lựa chọn tổ hợp vệ tinh tối ưu nhằm giảm HDOP, VDOP, PDOP, tăng độ chính xác và độ ổn định của nghiệm. Thuật toán lọc (Kalman filter, robust estimation) được áp dụng để loại bỏ vệ tinh có sai số lớn, tín hiệu yếu, hoặc bị ảnh hưởng bởi đa đường (multipath).
Nhờ multi-GNSS, định vị vệ tinh tàu biển duy trì được độ ổn định cao hơn, đặc biệt khi tàu hoạt động gần bờ, trong cảng, vùng có nhiều công trình che chắn hoặc khi một hệ vệ tinh tạm thời suy giảm chất lượng. Số lượng vệ tinh quan sát được tăng lên giúp:
- Giảm đáng kể xác suất rơi xuống dưới ngưỡng 4 vệ tinh cho nghiệm 3D, từ đó giảm nguy cơ mất fix hoặc phải lùi về nghiệm 2D kém chính xác.
- Cải thiện hình học vệ tinh (DOP thấp hơn), dẫn đến sai số vị trí nhỏ hơn ngay cả khi sai số đo khoảng cách không đổi.
- Tăng khả năng phát hiện và loại bỏ vệ tinh “xấu” thông qua các bài toán kiểm tra tính toàn vẹn (RAIM, advanced integrity monitoring).
Trong kiến trúc hệ thống hàng hải, multi-GNSS thường được kết hợp với các lớp tăng cường và cảm biến khác để hình thành một chuỗi định vị tích hợp:
- Multi-GNSS + SBAS/DGNSS: sử dụng tín hiệu hiệu chỉnh từ trạm bờ hoặc vệ tinh để giảm sai số quỹ đạo, đồng hồ, ionosphere, phù hợp cho luồng tàu ven bờ, khu vực có mạng trạm tham chiếu.
- Multi-GNSS + INS/IMU: tích hợp với hệ thống quán tính để duy trì vị trí trong thời gian ngắn khi GNSS suy giảm, hỗ trợ lọc nhiễu, làm mượt quỹ đạo tàu, đặc biệt hữu ích cho DP và điều khiển tự động.
- Multi-GNSS + cảm biến hàng hải truyền thống: kết hợp với log tốc độ, gyrocompass, radar, echosounder, visual fix để đáp ứng yêu cầu của SOLAS, IMO về dự phòng và đa nguồn dữ liệu vị trí.
Về mặt kỹ thuật, bộ thu GNSS hàng hải chuyên dụng thường tuân thủ các tiêu chuẩn:
- IEC 61108 (GNSS receiver equipment) quy định yêu cầu về độ chính xác, tính sẵn sàng, tính toàn vẹn, khả năng chống nhiễu và giao diện dữ liệu.
- IEC 61162 (giao thức dữ liệu, tương đương NMEA mở rộng) cho phép truyền thông tin vị trí, vận tốc, thời gian, chất lượng fix đến ECDIS, radar, AIS, VDR.
- Các khuyến nghị IMO, IALA liên quan đến sử dụng GNSS, DGNSS, SBAS trong hàng hải, bao gồm yêu cầu về dự phòng, cảnh báo khi chất lượng định vị suy giảm.
Trong thực tế khai thác, multi-GNSS mang lại lợi ích rõ rệt cho các tình huống:
- Tàu ra vào cảng hẹp, luồng cong, cần overlay chính xác giữa radar và ECDIS để nhận diện chướng ngại vật, phao tiêu, giới hạn luồng.
- Tàu hoạt động gần giàn khoan, công trình ngoài khơi, nơi có nhiều cấu trúc kim loại lớn gây che khuất và đa đường, yêu cầu hệ thống DP duy trì vị trí trong phạm vi vài mét.
- Tàu chạy ở vĩ độ cao, nơi một số hệ thống GNSS có hình học vệ tinh kém nếu dùng đơn lẻ; việc kết hợp nhiều chòm vệ tinh giúp cải thiện đáng kể độ phủ và chất lượng tín hiệu.
Ở mức chuyên sâu hơn, việc khai thác multi-GNSS trong hàng hải còn liên quan đến:
- Chiến lược lựa chọn hệ GNSS ưu tiên (ví dụ ưu tiên GPS + Galileo, dùng GLONASS/BeiDou như bổ sung) tùy theo khu vực hoạt động, quy định quốc gia, và đặc tính thiết bị.
- Quản lý nhiễu và spoofing: đa chòm vệ tinh, đa tần số giúp phát hiện bất thường trong tín hiệu (inconsistency check giữa các hệ), hỗ trợ các thuật toán chống giả mạo tín hiệu GNSS.
- Đồng bộ thời gian: sử dụng thời gian GNSS làm chuẩn cho toàn bộ hệ thống tàu (VDR, AIS, ECDIS, radar), multi-GNSS giúp tăng độ tin cậy của nguồn thời gian chuẩn khi một hệ bị gián đoạn.
Nhờ sự kết hợp giữa nhiều hệ thống GNSS, các kỹ thuật tăng cường và tích hợp cảm biến, định vị vệ tinh tàu biển ngày càng tiến tới mức độ chính xác cao, tính sẵn sàng gần như liên tục và khả năng giám sát tính toàn vẹn tốt hơn, đáp ứng yêu cầu ngày càng khắt khe của vận tải biển, khai thác ngoài khơi và các ứng dụng hàng hải tự động hóa.
Vai trò trung tâm của định vị vệ tinh tàu biển trong hệ thống navigation
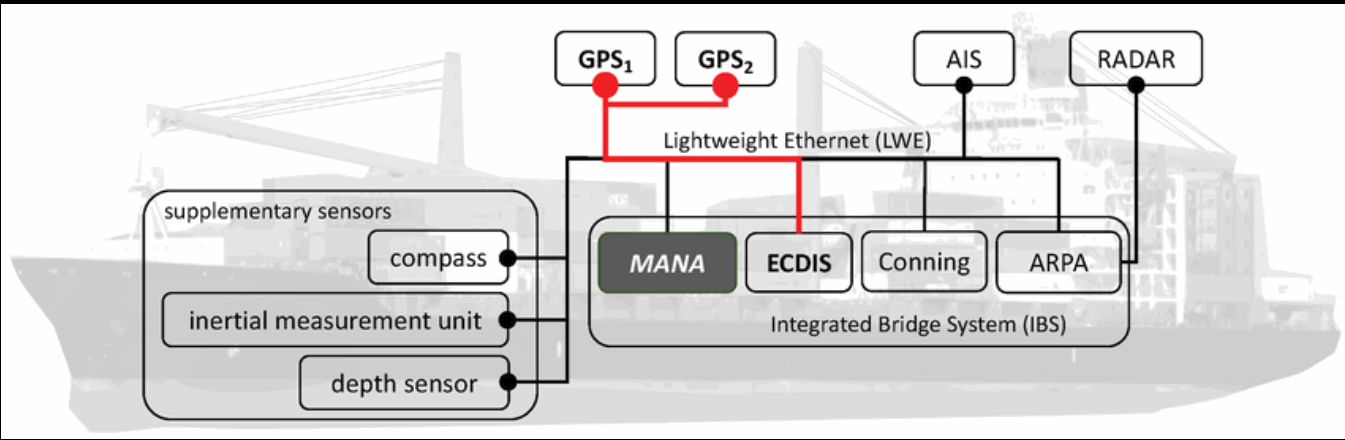
Hệ thống định vị vệ tinh tàu biển giữ vai trò trung tâm trong toàn bộ mạng lưới navigation, vừa là nguồn vị trí chuẩn, vừa là tham chiếu thời gian cho AIS, radar/ARPA, ECDIS, autopilot và INS/BAMS. Dữ liệu GNSS được xử lý tại GNSS Navigator, sau đó phân phối qua các cổng NMEA/IEC 61162 hoặc Ethernet đến từng thiết bị với cấu hình sentence, tốc độ baud và tần suất cập nhật phù hợp. Kiến trúc này đòi hỏi độ tin cậy cao, dự phòng đa nguồn GNSS, cơ chế kiểm tra integrity (RAIM, SBAS, DGPS) và giám sát cảnh báo tập trung. Nhờ đó, tàu duy trì được bức tranh điều hướng nhất quán, giảm nguy cơ sai lệch vị trí, chệch luồng và va chạm trong điều kiện khai thác phức tạp.
Định vị vệ tinh tàu biển như “bộ não vị trí” trên buồng lái
Trong hệ thống điều hướng của tàu biển hiện đại, máy định vị hàng hải GNSS/GPS được xem như “bộ não vị trí” của toàn bộ mạng lưới thiết bị trên buồng lái. Thiết bị này không chỉ đơn thuần hiển thị tọa độ cho sỹ quan trực ca, mà còn đóng vai trò là nguồn tham chiếu vị trí chuẩn (primary position reference) cho các hệ thống khác, đảm bảo tính nhất quán về dữ liệu vị trí, thời gian và chuyển động trên toàn bộ bridge.
Dữ liệu GNSS được tính toán từ bộ định vị sau đó được phân phối qua các cổng NMEA/IEC 61162 (RS422, Ethernet) đến nhiều thiết bị. Mỗi thiết bị sử dụng dữ liệu này theo một cách chuyên biệt, với các yêu cầu kỹ thuật và tiêu chuẩn tuân thủ khác nhau:
- AIS (Automatic Identification System)
AIS sử dụng dữ liệu vị trí (latitude, longitude), tốc độ (SOG – Speed Over Ground), hướng chuyển động (COG – Course Over Ground) và thời gian UTC từ GNSS để tạo thành các bản tin AIS Class A/B phát ra ngoài. Các bản tin này được chuẩn hóa theo ITU-R M.1371 và được các tàu khác, VTS, trạm bờ thu nhận.
Nếu dữ liệu GNSS không ổn định, AIS có thể chuyển sang trạng thái “lost GPS fix”, làm giảm tần suất cập nhật hoặc phát thông tin với cờ cảnh báo. Điều này ảnh hưởng trực tiếp đến khả năng nhận diện và tránh va trong vùng nước đông đúc, đặc biệt khi radar bị che khuất hoặc thời tiết xấu.
- Radar và ARPA
Radar hiện đại thường tích hợp chức năng radar overlay, hiển thị đường bờ, tuyến luồng, waypoint từ ECDIS hoặc chart system chồng lên ảnh radar. Để thực hiện chính xác, radar cần dữ liệu GNSS về vị trí tàu, COG, SOG và thời gian đồng bộ.
Hệ thống ARPA (Automatic Radar Plotting Aid) sử dụng dữ liệu GNSS để tính toán vector chuyển động tương đối và tuyệt đối của mục tiêu. Khi GNSS sai lệch, vector ARPA có thể bị dịch chuyển, gây sai số trong CPA (Closest Point of Approach) và TCPA (Time to CPA), làm giảm độ tin cậy trong quyết định tránh va.
- ECDIS (Electronic Chart Display and Information System)
ECDIS là nơi thể hiện rõ nhất vai trò “bộ não vị trí” của định vị vệ tinh tàu biển. Vị trí GNSS được hiển thị trực tiếp trên bản đồ điện tử ENC, kết hợp với dữ liệu route, waypoint, safety contour, alarm setting để hỗ trợ điều động an toàn.
ECDIS thường nhận nhiều nguồn vị trí (GNSS 1, GNSS 2, Loran-C – nếu còn, hoặc hệ thống dự phòng khác) và cho phép chọn primary position sensor. Khi nguồn GNSS chính bị mất hoặc bị nghi ngờ, ECDIS có thể tự động hoặc thủ công chuyển sang nguồn dự phòng, đồng thời phát cảnh báo “Position sensor lost/changed”.
Độ chính xác của GNSS ảnh hưởng trực tiếp đến:
- Độ lệch vị trí tàu so với tuyến luồng, đường tâm luồng (centre line).
- Khả năng phát hiện nguy cơ cạn (grounding) khi tàu tiến gần vùng nước nông.
- Độ tin cậy của các cảnh báo như cross track error (XTE), anti-grounding alarm, approach to waypoint.
- Autopilot / Track Control
Autopilot truyền thống chỉ dựa vào heading từ gyrocompass để giữ hướng (heading control). Tuy nhiên, trong chế độ track control (theo tiêu chuẩn IMO MSC.74(69) Annex 3), hệ thống cần dữ liệu GNSS về COG, SOG, XTE và waypoint để điều khiển tàu bám theo tuyến đã lập trên ECDIS hoặc chart system.
Khi GNSS cung cấp dữ liệu không chính xác hoặc bị trễ (latency cao), autopilot có thể điều khiển tàu lệch khỏi tuyến, gây chệch luồng, đặc biệt nguy hiểm trong kênh hẹp, khu vực có mật độ giao thông cao hoặc gần chướng ngại vật. Do đó, nhiều hệ thống track control tích hợp logic giám sát chất lượng dữ liệu GNSS (DOP, số vệ tinh, integrity flag) trước khi chấp nhận điều khiển theo track.
- INS / BAMS (Integrated Navigation System / Bridge Alert Management System)
INS tích hợp dữ liệu từ GNSS, gyrocompass, log (tốc độ qua nước), radar, AIS, echo sounder… để tạo nên bức tranh điều hướng tổng hợp. GNSS trong INS không chỉ là nguồn vị trí, mà còn là tham chiếu thời gian chuẩn để đồng bộ hóa các sensor khác.
BAMS (Bridge Alert Management System) sử dụng thông tin trạng thái từ GNSS (mất fix, HDOP cao, mất DGPS, mất SBAS, RAIM alarm) để phân loại và hiển thị cảnh báo theo cấp độ (caution, warning, alarm). Điều này giúp sỹ quan trực ca nhận biết nhanh khi nguồn vị trí chính bị suy giảm chất lượng và chuyển sang phương án dự phòng như radar fix, visual bearing, hoặc sử dụng nguồn GNSS thứ hai.
Vì định vị vệ tinh tàu biển là nguồn dữ liệu trung tâm, mọi sai lệch hoặc gián đoạn đều có thể gây hiệu ứng dây chuyền:
- Hiển thị sai vị trí tàu trên ECDIS, dẫn đến đánh giá sai khoảng cách tới chướng ngại vật, phao, đường bờ.
- Phát sai vị trí qua AIS, làm các tàu khác và VTS nhận thông tin không chính xác, ảnh hưởng đến quyết định tránh va và điều phối giao thông.
- Autopilot/track control điều khiển lệch tuyến, tăng nguy cơ chệch luồng, va chạm với bờ hoặc công trình ngoài khơi.
- Radar overlay không khớp với mục tiêu thực tế, gây nhầm lẫn khi so sánh giữa ảnh radar và đường bờ trên ENC.
Trong kiến trúc bridge hiện đại, định vị vệ tinh tàu biển được xem là một “single point of failure” quan trọng. Vì vậy, các yêu cầu sau được đặt ở mức rất cao:
- Độ tin cậy (reliability): sử dụng thiết bị đạt chuẩn IMO/IEC, có chứng nhận type approval, hỗ trợ nhiều chòm vệ tinh (GPS, GLONASS, Galileo, BeiDou) để tăng khả năng thu vệ tinh.
- Dự phòng (redundancy): lắp đặt ít nhất hai bộ GNSS độc lập, với anten, nguồn cấp và đường truyền riêng; cấu hình ECDIS/INS để có thể chuyển đổi nguồn vị trí tự động hoặc bán tự động.
- Kiểm tra integrity: sử dụng các cơ chế như RAIM, SBAS (EGNOS, WAAS, MSAS), hoặc DGPS để giám sát và cải thiện độ chính xác, đồng thời phát hiện sai số bất thường.
- Giám sát cảnh báo (alert monitoring): tích hợp trạng thái GNSS vào BAMS, đảm bảo mọi thay đổi về chất lượng tín hiệu, mất fix, mất differential đều được hiển thị rõ ràng, có âm thanh và thông báo trên màn hình.
Sơ đồ luồng dữ liệu định vị vệ tinh tàu biển
Một sơ đồ luồng dữ liệu điển hình của hệ thống định vị vệ tinh tàu biển có thể mô tả theo các khối chức năng chính, từ anten đến các thiết bị tiêu thụ dữ liệu:
- Antenna GNSS (trên cột, boong cao)
Anten GNSS được lắp ở vị trí cao, thoáng, tránh che khuất bởi cấu trúc thượng tầng, cẩu, ống khói. Thiết kế anten thường là loại active antenna, có khuếch đại tín hiệu tích hợp, cấp nguồn qua cáp đồng trục từ bộ định vị.
Các yếu tố kỹ thuật quan trọng:
- Độ lợi anten (antenna gain) phù hợp với chiều dài cáp để bù suy hao.
- Khả năng chống nhiễu RF, chống bão hòa khi gần nguồn phát mạnh (VSAT, radar X-band, S-band).
- Hỗ trợ đa tần (L1/L2, L5) và đa chòm vệ tinh để tăng độ tin cậy và độ chính xác.

- GNSS Navigator (trên buồng lái)
GNSS Navigator là bộ xử lý trung tâm, nhận tín hiệu từ anten, thực hiện các thuật toán định vị để tính toán:
- Vị trí: latitude, longitude, đôi khi cả height.
- Tốc độ: SOG, có thể kèm theo tốc độ theo trục (nếu tích hợp với log).
- Hướng chuyển động: COG, phân biệt với heading từ gyro.
- Thời gian: UTC chuẩn, dùng để đồng bộ toàn hệ thống.

Thiết bị này thường hỗ trợ nhiều chế độ hiệu chỉnh:
- GNSS standalone: sử dụng trực tiếp tín hiệu vệ tinh.
- DGPS: nhận tín hiệu hiệu chỉnh từ trạm bờ MF/HF hoặc qua kênh radio khác.
- SBAS: sử dụng vệ tinh địa tĩnh cung cấp dữ liệu hiệu chỉnh quỹ đạo, ionosphere.
Trên mặt trước GNSS Navigator thường có giao diện hiển thị trạng thái: số vệ tinh theo dõi, DOP, mode (2D/3D, DGPS, SBAS), cảnh báo RAIM, giúp sỹ quan đánh giá nhanh chất lượng định vị.
- NMEA/IEC Output → phân phối dữ liệu qua RS422 đến:
- AIS
- Radar
- ECDIS
- Autopilot
- INS / BAM
Trong khối output, chuẩn giao tiếp và cấu hình sentence NMEA là yếu tố then chốt trong thiết kế hệ thống navigation:
- Chuẩn giao tiếp vật lý
Phổ biến nhất là RS422 theo IEC 61162-1/2, với tốc độ baud 4.800 hoặc 38.400 bps tùy loại dữ liệu. Một số hệ thống mới sử dụng Ethernet (IEC 61162-450) để truyền dữ liệu NMEA qua mạng LAN, cho phép chia sẻ linh hoạt hơn và giảm số lượng cáp point-to-point.
- Cấu hình sentence NMEA
GNSS Navigator có thể phát nhiều loại câu NMEA, ví dụ:
GGA: Global Positioning System Fix Data – chứa vị trí, chất lượng fix, số vệ tinh, HDOP, altitude.RMC: Recommended Minimum Navigation Information – chứa thời gian, vị trí, COG, SOG, date.VTG: Course Over Ground and Ground Speed.GLL: Geographic Position – Latitude/Longitude.
Việc lựa chọn loại sentence, tần suất phát (1 Hz, 2 Hz, 10 Hz) và phân bổ cho từng cổng output phải phù hợp với yêu cầu của từng thiết bị nhận. Ví dụ, autopilot/track control có thể cần cập nhật COG/SOG ở tần suất cao hơn so với AIS.
- Số lượng cổng output và kiến trúc phân phối
Do GNSS là điểm hội tụ và phân phối dữ liệu, số lượng cổng output vật lý (NMEA OUT) là yếu tố quan trọng. Trên tàu lớn, thường sử dụng:
- Nhiều cổng NMEA OUT độc lập trên GNSS Navigator.
- Bộ NMEA buffer/splitter để nhân bản tín hiệu đến nhiều thiết bị.
- Mạng IEC 61162-450 qua Ethernet để phân phối dữ liệu dạng multicast.
Thiết kế phải đảm bảo khi một nhánh cáp hoặc một thiết bị bị lỗi, các thiết bị còn lại vẫn nhận được dữ liệu GNSS từ nguồn chính hoặc nguồn dự phòng, tránh tạo thêm “single point of failure” trong mạng lưới.
- Giám sát và kiểm tra chéo (cross-check)
Trong thực tế khai thác, ngoài việc dựa vào cảnh báo tự động, sỹ quan trực ca cần thường xuyên kiểm tra chéo vị trí GNSS với:
- Radar fix: so sánh vị trí tàu trên ECDIS với vị trí xác định bằng range/bearing tới mốc radar rõ ràng.
- Visual fix: sử dụng địa tiêu, phao, đèn biển khi điều kiện tầm nhìn cho phép.
- So sánh giữa hai nguồn GNSS độc lập: nếu chênh lệch vượt quá giới hạn cho phép, phải điều tra nguyên nhân và chọn nguồn tin cậy hơn.
Các quy trình này giúp phát hiện sớm các trường hợp GNSS bị nhiễu, spoofing hoặc sai số hệ thống mà RAIM/SBAS chưa kịp cảnh báo.
Trong toàn bộ cấu trúc, định vị vệ tinh tàu biển thực sự là điểm hội tụ và phân phối dữ liệu vị trí, thời gian cho mọi hệ thống điều hướng. Thiết kế số lượng cổng output, chuẩn giao tiếp, tốc độ baud, cấu hình sentence NMEA, cũng như chiến lược dự phòng và giám sát integrity, là nền tảng để xây dựng một hệ thống navigation an toàn, tuân thủ chuẩn IMO và đáp ứng yêu cầu khai thác thực tế.
Nguyên lý hoạt động của định vị vệ tinh tàu biển
Hệ thống định vị vệ tinh trên tàu biển vận hành dựa trên việc đo thời gian truyền sóng vô tuyến từ nhiều vệ tinh GNSS, chuyển thành khoảng cách giả và giải bài toán hình học trong không gian 3D. Mỗi vệ tinh đóng vai trò mốc chuẩn với vị trí và thời gian được xác định rất chính xác, cho phép bộ thu trên tàu tính toán tọa độ vĩ độ, kinh độ, cao độ và sai số đồng hồ. Độ chính xác định vị chịu ảnh hưởng bởi hình học vệ tinh (HDOP, PDOP), số lượng vệ tinh “healthy”, chất lượng tín hiệu, cũng như vị trí lắp đặt antenna và mức nhiễu điện từ xung quanh. Trong môi trường hàng hải, việc sử dụng bộ thu đa hệ, đa tần kết hợp antenna chuyên dụng và cấu hình lắp đặt đúng chuẩn giúp nâng cao độ tin cậy và ổn định nghiệm vị trí.
Quy trình đo khoảng cách và giải bài toán hình học
Nguyên lý cơ bản của định vị vệ tinh tàu biển là bài toán đo thời gian truyền sóng vô tuyến cực kỳ chính xác, sau đó chuyển đổi thành khoảng cách và giải hệ phương trình hình học trong không gian 3D. Về bản chất, mỗi vệ tinh GNSS (GPS, GLONASS, Galileo, BeiDou…) đóng vai trò như một “mốc chuẩn” có vị trí đã biết rất chính xác trong hệ tọa độ quán tính và mang theo một đồng hồ nguyên tử ổn định cao.
Mỗi vệ tinh GNSS liên tục phát:
- Tín hiệu thời gian chuẩn được đồng bộ với đồng hồ nguyên tử trên vệ tinh, mã hóa trong các mã giả ngẫu nhiên (C/A code, P(Y) code, B1I, E1…) cho phép bộ thu thực hiện phép đo thời gian truyền với độ phân giải cỡ nano giây.
- Dữ liệu quỹ đạo gồm:
- Ephemeris: tham số quỹ đạo chính xác cao, có thời hạn hiệu lực ngắn (vài giờ), dùng trực tiếp để tính vị trí tức thời của vệ tinh tại thời điểm đo.
- Almanac: dữ liệu quỹ đạo thô, độ chính xác thấp hơn nhưng có hiệu lực dài ngày, dùng để dự đoán sơ bộ vị trí vệ tinh và hỗ trợ quá trình tìm kiếm, khóa tín hiệu.
Bộ thu GNSS trên tàu thực hiện chuỗi bước xử lý tín hiệu và tính toán định vị ở mức chuyên sâu hơn:
- Nhận và khóa tín hiệu từ nhiều vệ tinh qua antenna GNSS:
- Antenna chuyển đổi sóng vô tuyến băng L (L1, L2, L5…) thành tín hiệu điện RF.
- Khối RF front-end khuếch đại, lọc, trộn tần và số hóa tín hiệu thành chuỗi mẫu IF để đưa vào bộ xử lý số.
- Bộ thu thực hiện acquisition (tìm kiếm mã và tần số Doppler) rồi chuyển sang tracking (bám mã và sóng mang) để duy trì khóa tín hiệu ổn định.
- Đo thời gian truyền từ vệ tinh đến antenna:
- Bộ thu tạo bản sao nội bộ của mã giả ngẫu nhiên (code replica) và trượt theo thời gian để khớp với mã nhận được từ vệ tinh.
- Độ trễ thời gian giữa mã phát (theo thông tin thời gian vệ tinh) và mã thu (theo đồng hồ bộ thu) chính là ước lượng thời gian truyền tín hiệu, đã bao gồm sai lệch đồng hồ bộ thu.
- Độ phân giải phép đo phụ thuộc vào loại mã, băng tần và kỹ thuật nội suy tương quan; với các bộ thu hàng hải chất lượng cao, sai số đo thô có thể ở mức vài mét trước khi hiệu chỉnh.
- Tính khoảng cách giả (pseudorange) đến từng vệ tinh:
- Khoảng cách giả được tính bằng: ρ = c · (treceiver − tsatellite), trong đó c là tốc độ ánh sáng, treceiver là thời gian đo theo đồng hồ bộ thu, tsatellite là thời gian phát theo đồng hồ vệ tinh.
- “Giả” vì khoảng cách này bao gồm cả sai số đồng hồ bộ thu, trễ tầng ion, trễ tầng đối lưu, sai số quỹ đạo, sai số đa đường (multipath)…
- Bộ thu áp dụng các mô hình hiệu chỉnh chuẩn (ionospheric model, tropospheric model, relativistic correction, group delay…) để giảm bớt các thành phần sai số có thể dự đoán.
- Giải hệ phương trình hình học với ít nhất 4 vệ tinh:
- Mỗi vệ tinh cung cấp một phương trình dạng mặt cầu: khoảng cách từ vị trí tàu đến vệ tinh bằng giá trị pseudorange đã hiệu chỉnh.
- Trong hệ tọa độ ECEF (Earth-Centered, Earth-Fixed), ẩn số gồm:
- Tọa độ 3D của antenna GNSS trên tàu: X, Y, Z.
- Sai số đồng hồ bộ thu: Δt (thường quy đổi thành sai số khoảng cách c·Δt).
- Với 4 vệ tinh “healthy”, hệ 4 phương trình phi tuyến có thể được giải bằng các thuật toán lặp như least squares, Kalman filter hoặc các biến thể robust để thu được nghiệm vị trí và sai số thời gian.
- Sau khi có nghiệm ECEF, bộ thu chuyển đổi sang vĩ độ, kinh độ, cao độ trong hệ quy chiếu trắc địa (thường là WGS-84) và áp dụng các hiệu chỉnh thủy chuẩn nếu cần cho ứng dụng hàng hải.
Để xác định vị trí trong không gian ba chiều và hiệu chỉnh sai số thời gian, bộ thu cần tối thiểu 4 vệ tinh “healthy”. Khi có nhiều vệ tinh hơn, hệ thống có thể:
- Tăng độ chính xác nhờ bài toán bình phương tối thiểu dư thừa, giảm ảnh hưởng của sai số đo trên từng vệ tinh riêng lẻ.
- Giảm HDOP và các chỉ số DOP khác (PDOP, VDOP), cải thiện độ tin cậy nghiệm trong điều kiện hình học vệ tinh thuận lợi.
- Thực hiện kiểm tra integrity như RAIM (Receiver Autonomous Integrity Monitoring), so sánh các nghiệm con để phát hiện và loại bỏ vệ tinh có sai số bất thường.
Các yếu tố ảnh hưởng đến độ chính xác định vị vệ tinh tàu biển
Độ chính xác của thiết bị định vị tàu biển là kết quả tổng hợp của nhiều nguồn sai số vật lý, môi trường và cấu hình hệ thống trên tàu. Việc hiểu rõ từng yếu tố giúp sỹ quan boong và kỹ sư điện – điện tử hàng hải tối ưu hóa lắp đặt, khai thác và đánh giá độ tin cậy của nghiệm định vị.
- Hình học vệ tinh (HDOP):
- Khi vệ tinh phân bố đều quanh tàu, có đủ vệ tinh ở các góc phương vị khác nhau và độ cao góc lớn – nhỏ đa dạng, ma trận hình học của bài toán định vị có điều kiện tốt, HDOP thấp, nghiệm vị trí ổn định, sai số lan truyền từ phép đo pseudorange sang tọa độ là nhỏ.
- Khi vệ tinh tập trung một phía, nằm gần nhau trên bầu trời hoặc chủ yếu ở góc cao (overhead) mà thiếu vệ tinh ở gần đường chân trời, ma trận hình học bị suy biến, HDOP cao, sai số đo nhỏ cũng có thể gây sai lệch vị trí đáng kể.
- Trong môi trường hàng hải, HDOP thường tốt hơn so với đô thị do ít che khuất, nhưng vẫn có thể xấu khi tàu ở vĩ độ cao, gần vùng biên phủ sóng của một số chòm vệ tinh hoặc khi antenna bị che bởi kết cấu tàu.
- Số lượng vệ tinh sử dụng:
- Bộ thu đa hệ GNSS hiện đại có thể theo dõi đồng thời hàng chục vệ tinh, nhưng thuật toán định vị sẽ lựa chọn một tập con “vệ tinh sử dụng” dựa trên tiêu chí:
- Tình trạng vệ tinh (healthy/unhealthy, flagged).
- Mức tín hiệu (C/N0), độ ổn định bám mã và sóng mang.
- Góc nâng (elevation mask) để loại vệ tinh quá thấp dễ bị nhiễu đa đường và suy hao.
- Càng nhiều vệ tinh “healthy” tham gia tính toán, nghiệm càng vững, khả năng phát hiện vệ tinh lỗi qua RAIM hoặc các kỹ thuật integrity monitoring càng cao.
- Trong một số cấu hình chuyên dụng (DGPS, SBAS, RTK), bộ thu còn sử dụng thêm vệ tinh geostationary (SBAS) hoặc trạm tham chiếu mặt đất để tăng độ chính xác và độ tin cậy.
- Bộ thu đa hệ GNSS hiện đại có thể theo dõi đồng thời hàng chục vệ tinh, nhưng thuật toán định vị sẽ lựa chọn một tập con “vệ tinh sử dụng” dựa trên tiêu chí:
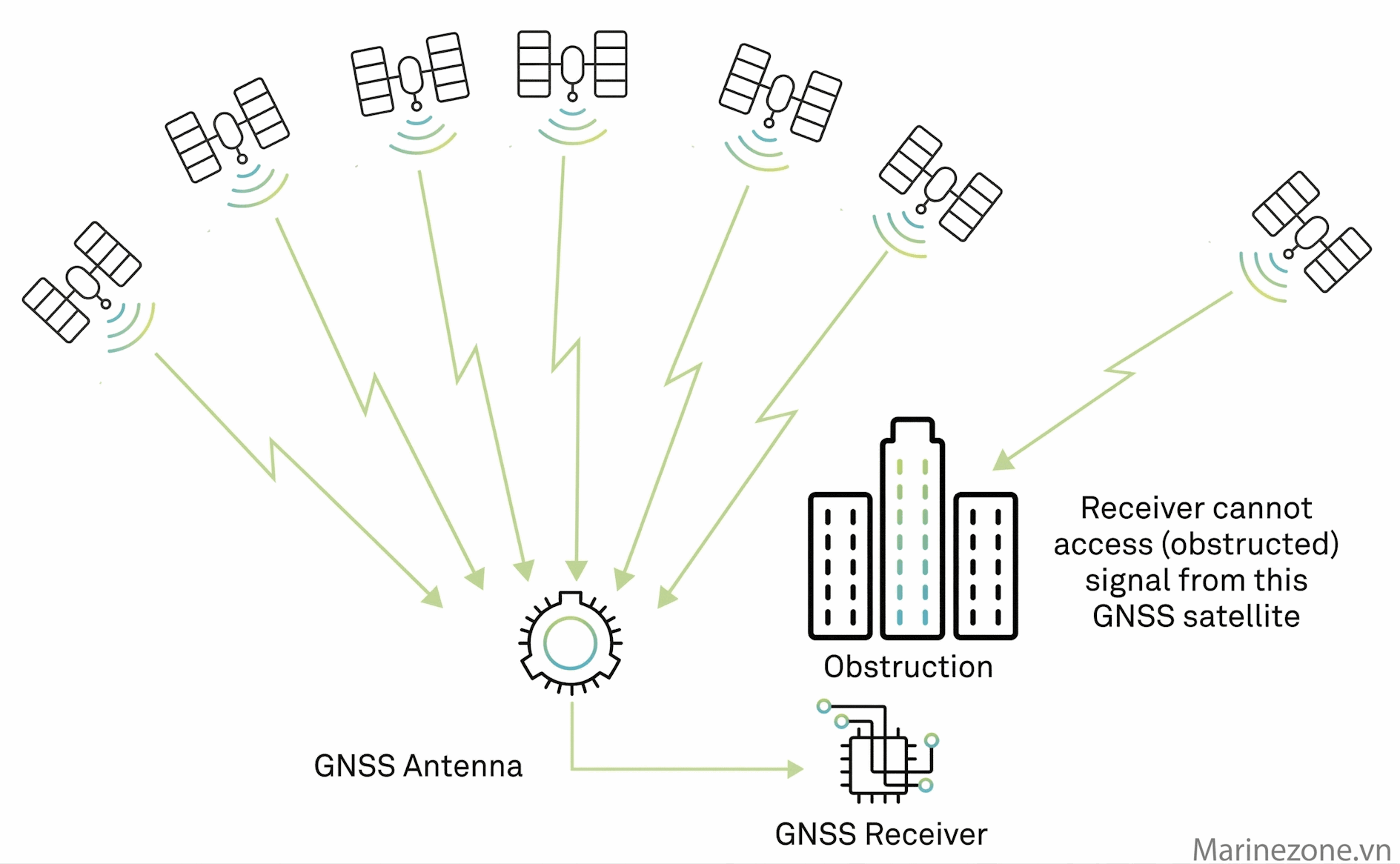
- Vị trí lắp antenna GNSS:
- Khi antenna bị che khuất bởi kết cấu tàu, cẩu, ống khói, container xếp cao…:
- Số vệ tinh khả dụng giảm, đặc biệt ở các hướng bị che, làm xấu hình học vệ tinh.
- Tín hiệu đến theo đường phản xạ nhiều hơn, tăng sai số đa đường (multipath), gây dao động nghiệm vị trí.
- Khi antenna nằm trong vùng quét radar hoặc gần antenna VHF, MF/HF, AIS:
- Có thể xuất hiện nhiễu xuyên kênh, bão hòa front-end RF, làm giảm C/N0 hoặc gây mất khóa tín hiệu.
- Cần tuân thủ khoảng cách tối thiểu, sử dụng bộ lọc band-pass, choke, và bố trí dây cáp đồng trục hợp lý để giảm nhiễu.
- Khi antenna không có “tầm nhìn bầu trời” 360°:
- Giảm số vệ tinh khả dụng, đặc biệt ở các hướng tàu thường xuyên quay mũi, làm nghiệm vị trí kém ổn định khi tàu đổi hướng.
- Trong thiết kế hàng hải, antenna GNSS thường được đặt ở vị trí cao, thoáng, cách xa nguồn nhiễu RF, có mặt phẳng tham chiếu kim loại hợp lý để tối ưu hóa sơ đồ bức xạ.
- Khi antenna bị che khuất bởi kết cấu tàu, cẩu, ống khói, container xếp cao…:
- Nhiễu điện từ và môi trường:
- Nhiễu từ thiết bị điện tử công suất lớn, radar, radio:
- Các hệ thống radar X-band, S-band, thiết bị GMDSS, AIS, VHF, MF/HF, Inmarsat… có thể tạo ra phổ nhiễu rộng, xung công suất cao.
- Nếu không có biện pháp chống nhiễu (lọc, tách đất, bố trí cáp, khoảng cách an toàn), bộ thu GNSS có thể bị suy giảm độ nhạy, tăng tỷ lệ mất khóa, đặc biệt trong điều kiện biển động khi tàu lắc mạnh.
- Ảnh hưởng tầng ion, tầng đối lưu, đa đường (multipath):
- Tầng ion gây trễ phụ thuộc tần số, thay đổi theo thời gian trong ngày, hoạt động mặt trời và vĩ độ địa từ; các bộ thu hàng hải thường sử dụng mô hình ionospheric broadcast hoặc đo hai tần số để hiệu chỉnh.
- Tầng đối lưu gây trễ gần như không phụ thuộc tần số, liên quan đến áp suất, nhiệt độ, độ ẩm; được hiệu chỉnh bằng các mô hình chuẩn (Saastamoinen, Hopfield…).
- Đa đường (multipath) trên tàu biển đặc biệt đáng chú ý:
- Sóng GNSS phản xạ từ mặt nước biển, boong tàu, kết cấu thép, cẩu, ống khói… tạo ra các đường truyền phụ với độ trễ khác nhau.
- Một số thành phần phản xạ có thể giao thoa với tín hiệu trực tiếp, làm sai lệch phép đo pseudorange và pha sóng mang, gây dao động vị trí theo chu kỳ khi tàu di chuyển hoặc lắc.
- Antenna hàng hải chuyên dụng thường có thiết kế chống multipath (pattern hướng lên trời, giảm độ nhạy phía dưới đường chân trời) và sử dụng mặt phẳng phản xạ hợp lý để giảm ảnh hưởng này.
- Nhiễu từ thiết bị điện tử công suất lớn, radar, radio:
Trong thực tế, định vị vệ tinh tàu biển chất lượng cao luôn kết hợp:
- Bộ thu đa hệ GNSS:
- Hỗ trợ nhiều chòm vệ tinh (GPS, GLONASS, Galileo, BeiDou, QZSS…) giúp tăng số vệ tinh khả dụng, cải thiện hình học và độ tin cậy.
- Hỗ trợ nhiều băng tần (L1/L2/L5 hoặc tương đương) cho phép hiệu chỉnh ionosphere chính xác hơn, đặc biệt quan trọng với các ứng dụng đòi hỏi độ chính xác cao như định vị neo, DP (Dynamic Positioning).
- Antenna chuyên dụng hàng hải:
- Có đặc tính bức xạ tối ưu cho môi trường biển, chống ăn mòn, chống nước, chịu rung lắc và nhiệt độ khắc nghiệt.
- Thiết kế để giảm thu tín hiệu phản xạ từ dưới đường chân trời, tích hợp bộ lọc nhiễu và đôi khi có cả LNA (Low Noise Amplifier) chất lượng cao ngay tại antenna.
- Cấu hình lắp đặt, đi dây, chống nhiễu đúng chuẩn:
- Tuân thủ khuyến cáo của IMO, IEC, ITU và nhà sản xuất về vị trí lắp đặt, khoảng cách tối thiểu tới các antenna khác, phương án tiếp đất và chống sét.
- Sử dụng cáp đồng trục chất lượng cao, chiều dài phù hợp, đầu nối chống nước, kết hợp bộ khuếch đại trung gian nếu khoảng cách quá xa để tránh suy hao tín hiệu.
- Áp dụng các biện pháp EMC/EMI: lọc nguồn, tách mass, bố trí cáp tách biệt với đường cáp công suất cao, tránh chạy song song với cáp radar hoặc radio công suất lớn.
Cấu trúc hệ thống định vị vệ tinh tàu biển
Hệ thống định vị vệ tinh tàu biển được tổ chức như một khối thiết bị trung tâm, kết hợp chặt chẽ giữa phần cứng, phần mềm và mạng truyền thông dữ liệu. Antenna GNSS hàng hải đảm nhiệm vai trò thu tín hiệu đa chòm vệ tinh, chống chịu môi trường khắc nghiệt và hạn chế nhiễu, đảm bảo nguồn tín hiệu đầu vào ổn định. Bộ xử lý trung tâm GNSS Navigator giải mã, hiệu chỉnh và tính toán vị trí, tốc độ, thời gian, đồng thời hiển thị thông số điều hướng trên giao diện trực quan, cho phép cấu hình linh hoạt hệ vệ tinh và sentence NMEA. Hệ thống truyền dữ liệu dựa trên chuẩn NMEA 0183/IEC 61162 qua RS422 phân phối thông tin tới AIS, radar, ECDIS, autopilot. Nguồn cấp DC 24V cùng các mạch bảo vệ quá áp, ngược cực, chống nhiễu và chống sét giúp duy trì hoạt động an toàn, liên tục cho toàn bộ cấu trúc định vị.
Các thành phần chính trong hệ thống GPS/GNSS tàu biển
Một hệ thống định vị vệ tinh tàu biển tiêu chuẩn trên tàu hàng, tàu khách hoặc tàu dịch vụ offshore thường được thiết kế như một khối thiết bị định vị trung tâm, đáp ứng đồng thời yêu cầu của SOLAS, IMO, IEC và các quy phạm đăng kiểm (VR, DNV, ABS…). Về mặt kiến trúc, hệ thống không chỉ bao gồm phần cứng cơ bản mà còn bao gồm các lớp phần mềm xử lý, giao thức truyền thông và các cơ chế dự phòng nhằm đảm bảo tính sẵn sàng cao trong mọi điều kiện khai thác.
- Antenna GNSS hàng hải:
- Lắp đặt ngoài trời, vị trí cao, thoáng, tránh che khuất:
- Ưu tiên lắp trên cột radar mast hoặc trên đỉnh deckhouse, đảm bảo góc nhìn bầu trời ≥ 360° theo phương ngang và ≥ 5–10° so với đường chân trời.
- Tránh lắp gần anten radar X-band/S-band, anten VSAT, Inmarsat để giảm nhiễu RF; khoảng cách tách tối thiểu thường từ 3–5 m tùy khuyến cáo nhà sản xuất.
- Hạn chế đặt gần kết cấu thép lớn (ống khói, cẩu boong, giàn khoan) gây hiệu ứng phản xạ đa đường (multipath), làm suy giảm độ chính xác GNSS.
- Thiết kế chống nước, chống muối, đạt chuẩn IP66 trở lên:
- Vỏ anten thường dùng nhựa kỹ thuật hoặc composite chống UV, chịu được môi trường muối biển, hơi ẩm và bức xạ mặt trời liên tục.
- Cấp bảo vệ IP66/IP67 giúp chống nước mưa, sóng bắn và ngâm tạm thời; các đầu nối RF (TNC, N-type…) được bịt kín bằng gioăng cao su và keo chống ẩm.
- Đáp ứng các thử nghiệm rung, sốc, sương muối theo IEC 60945 cho thiết bị hàng hải.
- Thu tín hiệu từ nhiều hệ vệ tinh (GPS, GLONASS, BeiDou…):
- Hỗ trợ đa chòm vệ tinh (multi-constellation): GPS (L1/L2), GLONASS, Galileo, BeiDou, QZSS… giúp tăng số vệ tinh quan sát được, cải thiện độ chính xác và độ tin cậy.
- Nhiều anten tích hợp bộ khuếch đại nhiễu thấp LNA (Low Noise Amplifier) ngay tại đầu thu để bù suy hao trên cáp đồng trục dài (thường 30–50 m, có thể tới 100 m).
- Một số anten hỗ trợ thêm tín hiệu SBAS (WAAS, EGNOS, MSAS) hoặc tín hiệu vi sai DGPS từ trạm bờ, phục vụ yêu cầu định vị chính xác cao cho luồng hẹp, cảng, khu vực offshore.
- Lắp đặt ngoài trời, vị trí cao, thoáng, tránh che khuất:
- Bộ xử lý trung tâm (GNSS Navigator):
- Thực hiện giải mã tín hiệu, tính toán vị trí, tốc độ, thời gian:
- Bộ thu GNSS bên trong thực hiện các bước: đồng bộ mã giả (pseudorange), giải điều chế dữ liệu dẫn đường, tính toán quỹ đạo vệ tinh (ephemeris) và ước lượng vị trí 3D.
- Áp dụng các mô hình hiệu chỉnh: sai số đồng hồ vệ tinh, trễ tầng điện ly, trễ tầng đối lưu, sai số quỹ đạo, sai số đa đường; trên tàu biển thường đạt độ chính xác 3–10 m (2D RMS).
- Tính toán các tham số dẫn đường: vị trí (lat/long), SOG (Speed Over Ground), COG (Course Over Ground), thời gian UTC, HDOP/PDOP, số vệ tinh sử dụng, trạng thái fix (2D/3D/DGPS).
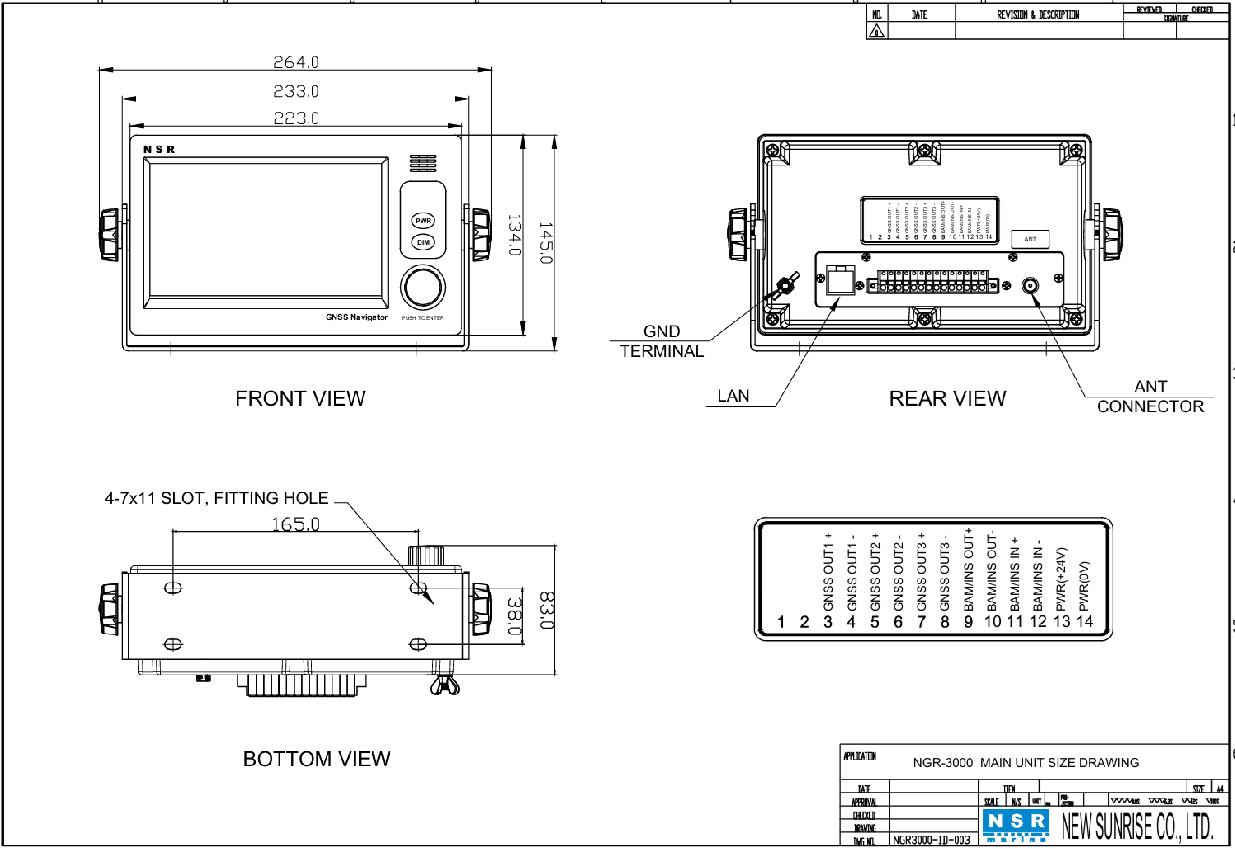
- Hiển thị thông số điều hướng trên màn hình màu, giao diện thân thiện:
- Màn hình màu TFT hoặc LCD, kích thước 4.3–7 inch, hỗ trợ hiển thị dạng số, dạng la bàn, dạng track, trạng thái vệ tinh và chất lượng tín hiệu.
- Cho phép người vận hành xem nhanh các thông số quan trọng: vị trí hiện tại, SOG/COG, sai số ước lượng (Estimated Position Error), trạng thái DGPS, cảnh báo mất fix.
- Giao diện menu hỗ trợ nhiều ngôn ngữ, phím cứng hoặc phím mềm, có đèn nền phù hợp sử dụng trên buồng lái ban đêm.
- Cho phép cấu hình hệ vệ tinh, cổng dữ liệu, sentence NMEA, baud rate:
- Cấu hình lựa chọn hệ vệ tinh sử dụng (GPS only, GPS+GLONASS, GPS+BeiDou…) để tương thích với yêu cầu của từng vùng hoạt động và quy định quốc gia.
- Thiết lập các sentence NMEA 0183/IEC 61162 được phát: GGA, GLL, RMC, VTG, GSA, GSV, ZDA…; có thể bật/tắt từng sentence cho từng cổng output.
- Điều chỉnh baud rate (4800/9600/19200/38400 bps) phù hợp với thiết bị nhận: AIS, radar, ECDIS, autopilot; đảm bảo không quá tải băng thông cổng nối tiếp.
- Thực hiện giải mã tín hiệu, tính toán vị trí, tốc độ, thời gian:
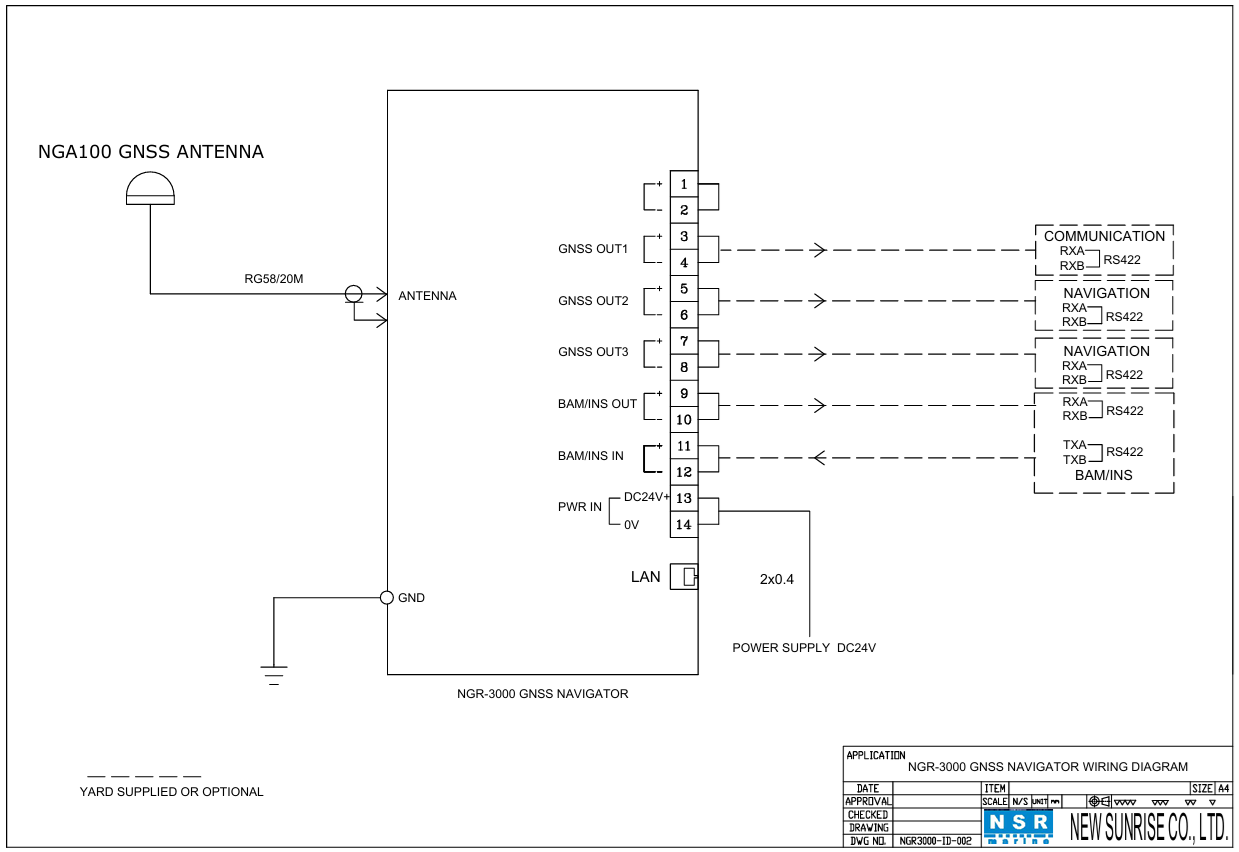
- Hệ thống truyền dữ liệu:
- Sử dụng chuẩn NMEA 0183 / IEC 61162 qua giao tiếp RS422:
- NMEA 0183 là chuẩn câu lệnh dạng ASCII, mỗi câu tối đa 82 ký tự, bắt đầu bằng ký tự ‘$’ hoặc ‘!’, kết thúc bằng CR/LF, có checksum để kiểm tra lỗi.
- IEC 61162-1/-2 là chuẩn hóa hàng hải của NMEA 0183, quy định mức điện áp, cách ly, chống nhiễu và yêu cầu an toàn cho thiết bị trên tàu.
- Giao tiếp RS422 (differential) cho phép truyền xa hơn, chống nhiễu tốt hơn RS232, phù hợp môi trường nhiễu điện từ mạnh trên buồng lái và boong.
- Có thể có nhiều cổng output để cấp dữ liệu cho AIS, radar, ECDIS, autopilot:
- Các GNSS Navigator hàng hải thường có 2–6 cổng output độc lập, mỗi cổng có thể cấu hình sentence và tốc độ truyền riêng.
- Thiết kế phân tách: một cổng chuyên cho AIS (yêu cầu update nhanh RMC, GGA), một cổng cho radar/ARPA (phục vụ overlay và tính toán vector), một cổng cho ECDIS, một cổng cho autopilot.
- Một số hệ thống hỗ trợ thêm cổng Ethernet hoặc NMEA 2000 để tích hợp với mạng dữ liệu nội bộ trên tàu (bridge LAN, sensor network).
- Hỗ trợ nhiều tốc độ truyền: 4800, 9600, 19200, 38400 bps:
- 4800 bps thường dùng cho các thiết bị truyền ít sentence, tần suất thấp (ví dụ autopilot, một số thiết bị đo sâu cũ).
- 38400 bps (NMEA “high speed”) thường dùng cho AIS, radar, ECDIS khi cần lượng dữ liệu lớn, cập nhật nhanh.
- Việc lựa chọn baud rate phải đồng bộ giữa GNSS Navigator và thiết bị nhận, nếu không sẽ gây lỗi đọc dữ liệu hoặc mất sentence.
- Sử dụng chuẩn NMEA 0183 / IEC 61162 qua giao tiếp RS422:
- Nguồn cấp và bảo vệ:
- Hoạt động với nguồn DC 24V, dải 12–36V:
- Hầu hết thiết bị định vị vệ tinh tàu biển được thiết kế cho hệ thống điện 24 VDC của tàu, nhưng chấp nhận dải rộng để phù hợp nhiều loại tàu và biến động điện áp.
- Có thể cấp nguồn từ bảng phân phối trên bridge, qua CB riêng, có nhãn rõ ràng theo yêu cầu của SOLAS và đăng kiểm.
- Một số hệ thống hỗ trợ cấp nguồn dự phòng từ UPS hoặc battery backup để duy trì hoạt động khi mất điện chính.
- Có bảo vệ quá áp, ngược cực, chống nhiễu nguồn:
- Mạch bảo vệ quá áp, quá dòng, chống đấu ngược cực giúp tránh hư hỏng thiết bị khi thao tác sai hoặc khi hệ thống điện tàu có xung áp.
- Bộ lọc nhiễu (EMI/RFI filter) và cách ly galvanic giúp giảm ảnh hưởng của nhiễu từ máy phát, động cơ, biến tần, radar… lên tín hiệu GNSS.
- Thường kết hợp chống sét lan truyền trên đường anten (surge protector) và trên đường nguồn để bảo vệ trước sét đánh gần hoặc phóng điện khí quyển.
- Hoạt động với nguồn DC 24V, dải 12–36V:
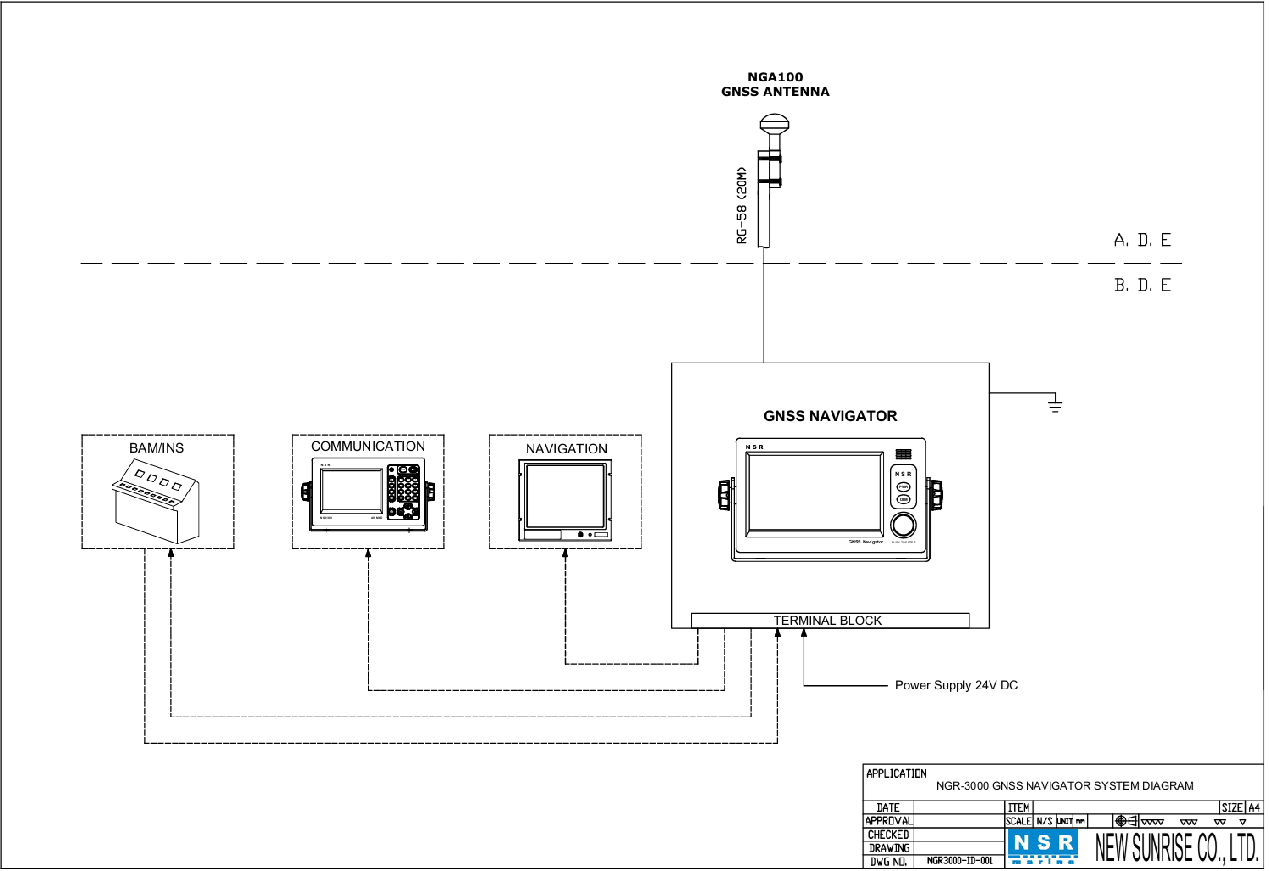
Sơ đồ hệ thống GNSS trên tàu biển
Một sơ đồ cơ bản của hệ thống định vị vệ tinh tàu biển có thể mô tả theo chuỗi chức năng liên tục từ thu tín hiệu, xử lý, phân phối đến các hệ thống dẫn đường khác trên buồng lái. Chuỗi này thể hiện rõ vai trò trung tâm của GNSS trong mạng cảm biến hàng hải hiện đại.
- Antenna GNSS → thu tín hiệu vệ tinh:
- Nhận đồng thời tín hiệu từ nhiều vệ tinh thuộc các chòm khác nhau, đảm bảo luôn có đủ số vệ tinh để tính toán vị trí ngay cả khi một phần bầu trời bị che khuất.
- Chuyển tín hiệu RF qua cáp đồng trục đến GNSS Navigator với suy hao được tính toán trước; trong thiết kế thường quy định loại cáp (RG-58, RG-213, LMR-400…) và chiều dài tối đa.
- Có thể sử dụng thêm bộ khuếch đại trung gian (inline amplifier) nếu khoảng cách anten–thiết bị quá xa, đặc biệt trên tàu lớn hoặc giàn khoan.
- GNSS Navigator → xử lý, hiển thị, tạo dữ liệu NMEA:
- Thực hiện toàn bộ thuật toán định vị, lọc và làm mượt dữ liệu (smoothing) để giảm nhiễu, tránh dao động vị trí khi tàu đứng yên hoặc di chuyển chậm.
- Áp dụng các chế độ cảnh báo: mất tín hiệu vệ tinh, sai số vượt ngưỡng, mất DGPS, sai lệch thời gian; các cảnh báo này được hiển thị trên màn hình và có thể xuất ra cổng alarm.
- Tạo các câu NMEA chuẩn hóa, đảm bảo tương thích với mọi thiết bị hàng hải tuân thủ IEC 61162, đóng vai trò như một “bộ cảm biến vị trí chuẩn” cho toàn bộ hệ thống.
- Cổng NMEA Output → phân phối dữ liệu đến:
- AIS (Automatic Identification System):
- AIS sử dụng dữ liệu vị trí, SOG, COG, thời gian từ GNSS để tạo bản tin AIS Class A/B phát ra VHF, phục vụ nhận dạng và tránh va.
- Độ tin cậy và độ chính xác của GNSS ảnh hưởng trực tiếp đến chất lượng thông tin hiển thị trên màn hình AIS của tàu khác và trạm bờ.
- Radar (ARPA, overlay):
- Radar ARPA sử dụng dữ liệu GNSS để tính toán vector chuyển động tương đối/ tuyệt đối, hiển thị CPA/TCPA chính xác hơn.
- Chức năng radar overlay trên ECDIS hoặc trên chính màn hình radar yêu cầu dữ liệu vị trí GNSS để chồng ảnh radar lên bản đồ điện tử.
- ECDIS (Electronic Chart Display and Information System):
- ECDIS dùng GNSS làm nguồn vị trí chính để hiển thị tàu trên bản đồ ENC, tính toán route, cross track error (XTE), cảnh báo chệch tuyến.
- Trong thiết kế bridge theo chuẩn SOLAS, thường bố trí ít nhất hai nguồn GNSS độc lập (primary/secondary) để ECDIS có thể chuyển đổi khi nguồn chính lỗi.
- Autopilot (Heading/Track control):
- Autopilot chế độ track control sử dụng COG và XTE từ GNSS/ECDIS để điều khiển bánh lái giữ tàu đi đúng tuyến đã lập kế hoạch.
- Yêu cầu dữ liệu GNSS ổn định, độ trễ thấp; nếu mất tín hiệu hoặc sai số lớn, autopilot phải tự động chuyển về chế độ heading control hoặc báo cho sỹ quan trực ca.
- AIS (Automatic Identification System):
Trong cấu trúc này, định vị vệ tinh tàu biển đóng vai trò như một “hub dữ liệu” trung tâm cho toàn bộ hệ thống navigation. Khi thiết kế hệ thống bridge theo chuẩn SOLAS, cần xem xét chi tiết:
- Số lượng cổng output và khả năng mở rộng:
- Xác định số thiết bị cần dữ liệu GNSS (AIS, radar chính, radar phụ, ECDIS 1, ECDIS 2, autopilot, VDR, conning display…) để chọn GNSS Navigator có đủ cổng.
- Cân nhắc sử dụng bộ lặp NMEA (NMEA buffer/repeater) khi cần phân phối dữ liệu đến nhiều thiết bị hơn số cổng sẵn có, đồng thời vẫn đảm bảo cách ly điện.
- Cấu hình output và quản lý sentence:
- Thiết lập riêng từng cổng với tập sentence tối ưu, tránh gửi dư thừa gây quá tải băng thông và tăng nguy cơ lỗi giao tiếp.
- Đảm bảo các thiết bị quan trọng (ECDIS, VDR) nhận đủ các sentence bắt buộc theo yêu cầu của IMO và nhà sản xuất thiết bị.
- Dự phòng nguồn và dự phòng thiết bị:
- Bố trí nguồn cấp kép (main/backup) cho GNSS Navigator, có thể từ hai bảng phân phối khác nhau hoặc từ UPS riêng cho thiết bị navigation.
- Lắp đặt ít nhất hai hệ thống GNSS độc lập (primary/secondary) với anten, cáp, nguồn tách biệt; ECDIS và các hệ thống quan trọng phải có khả năng chuyển đổi nguồn GNSS tự động hoặc bằng tay.
- Thiết lập quy trình kiểm tra định kỳ: so sánh vị trí giữa hai GNSS, so sánh với radar fix, kiểm tra cảnh báo để phát hiện sai lệch hệ thống.
Dữ liệu GNSS, chuẩn NMEA và tích hợp hệ thống
Chuẩn NMEA 0183 và IEC 61162 tạo nên lớp giao tiếp chuẩn hóa cho dữ liệu GNSS, giúp các thiết bị hàng hải “hiểu” được vị trí, thời gian, tốc độ và trạng thái hệ thống. Thông qua cấu trúc câu dữ liệu chặt chẽ, cơ chế checksum và quy tắc talker ID/message type, dữ liệu GNSS được truyền tin cậy qua RS422 hoặc Ethernet, phục vụ cả hệ thống nối tiếp truyền thống lẫn mạng IP hiện đại. Các câu GGA, RMC, VTG, ZDA cung cấp bộ thông tin tối thiểu nhưng thiết yếu cho AIS, radar, ECDIS, autopilot và VDR, với chu kỳ gửi và tốc độ baud được tối ưu để tránh quá tải. Khi tích hợp sâu với INS, multi-GNSS và các cảm biến tốc độ, định vị vệ tinh trở thành nền tảng cho điều hướng an toàn, tự động hóa và tuân thủ chuẩn SOLAS/IMO.
Chuẩn NMEA 0183 và IEC 61162 trong định vị vệ tinh tàu biển
Trong môi trường hàng hải hiện đại, NMEA 0183 và IEC 61162 không chỉ là chuẩn giao tiếp đơn thuần mà còn là “ngôn ngữ chung” cho toàn bộ hệ thống định vị và điều hướng trên tàu. Hai chuẩn này quy định chi tiết:
- Cấu trúc câu dữ liệu (sentence), cách mã hóa, ký tự bắt đầu/kết thúc, checksum.
- Quy tắc đặt tên talker ID (GP, GN, GL, GA, GI…) và message type (GGA, RMC, VTG…).
- Thông số điện, mức tín hiệu, phương thức truyền dẫn nối tiếp.
NMEA 0183 truyền thống sử dụng giao tiếp nối tiếp kiểu asynchronous, dạng text ASCII, tốc độ phổ biến 4.800 bps hoặc 38.400 bps (High Speed AIS). Trong khi đó, IEC 61162 là chuẩn quốc tế mở rộng, bao gồm:
- IEC 61162-1: Tương thích NMEA 0183, định nghĩa lớp giao tiếp nối tiếp tốc độ thấp.
- IEC 61162-2: Giao tiếp tốc độ cao hơn, phục vụ các ứng dụng cần băng thông lớn.
- IEC 61162-450: Truyền dữ liệu hàng hải trên nền Ethernet (UDP/IP), dùng trong hệ thống tích hợp hiện đại.
Trong định vị vệ tinh tàu biển, các chuẩn này cho phép:
- Truyền dữ liệu vị trí, tốc độ, thời gian, trạng thái hệ thống GNSS đến AIS, radar, ECDIS, autopilot, VDR, INS.
- Đảm bảo tính tương thích giữa thiết bị của nhiều hãng, giảm rủi ro “không nói chuyện được với nhau”.
- Chuẩn hóa định dạng câu dữ liệu, giúp thiết bị thu nhận dễ dàng kiểm tra lỗi, lọc và xử lý.
Về lớp vật lý, các cổng giao tiếp GNSS hàng hải thường dùng RS422 (differential signaling) thay vì RS232 vì:
- Khả năng chống nhiễu cao hơn trong môi trường điện từ phức tạp trên tàu (máy phát, động cơ, radar, VHF…).
- Cho phép truyền xa hơn (hàng chục đến hàng trăm mét) mà vẫn giữ được chất lượng tín hiệu.
- Hỗ trợ kết nối dạng multi-drop (một nguồn phát đến nhiều thiết bị thu) thông qua bộ lặp/bộ chia.
Trong các hệ thống tích hợp mới, ngoài RS422 còn có:
- Kết nối Ethernet/IEC 61162-450 để truyền dữ liệu GNSS dạng multicast đến nhiều thiết bị cùng lúc.
- Các gateway chuyển đổi NMEA 0183 <-> NMEA 2000, 0183 <-> 61162-450 để tương thích với mạng CAN bus hoặc IP.
Các câu dữ liệu GNSS quan trọng
Dữ liệu từ máy định vị hàng hải (GNSS receiver) được đóng gói thành các câu NMEA (sentence) với cấu trúc:
$ttxxx,field1,field2,...*CS<CR><LF>
- tt: Talker ID (GP – GPS, GN – multi-GNSS, GA – Galileo, GL – GLONASS…)
- xxx: Loại message (GGA, RMC, VTG…)
- CS: Checksum (2 ký tự hex) để phát hiện lỗi truyền.
Một số câu lệnh quan trọng trong định vị vệ tinh tàu biển và ý nghĩa chuyên sâu:
- GGA – Global Positioning System Fix Data
- Cung cấp vĩ độ, kinh độ, kiểu fix (0 – no fix, 1 – GPS fix, 2 – DGPS fix, 4 – RTK fixed…), số vệ tinh sử dụng, HDOP, cao độ so với mực nước biển trung bình (MSL).
- Trường HDOP (Horizontal Dilution of Precision) phản ánh chất lượng hình học chòm vệ tinh; HDOP thấp tương đương độ chính xác ngang cao.
- Trường Age of Differential Data và DGPS Station ID cho biết tình trạng hiệu chỉnh vi sai (SBAS, beacon DGPS…).
- Trong nhiều hệ thống, GGA được dùng để đánh giá chất lượng tín hiệu GNSS trước khi cho phép autopilot hoặc INS sử dụng.
- RMC – Recommended Minimum Navigation Information
- Cung cấp thời gian UTC, trạng thái fix (A – valid, V – void), vị trí, tốc độ trên mặt đất (SOG), hướng di chuyển trên mặt đất (COG), ngày tháng, magnetic variation.
- Đây là câu “tối thiểu khuyến nghị” cho hầu hết thiết bị hàng hải: AIS, radar, ECDIS, VDR thường chỉ cần RMC là đã có thể hoạt động cơ bản.
- Trường COG và SOG trong RMC thường được ưu tiên hơn dữ liệu từ log tốc độ hoặc gyro khi tính toán vector chuyển động trên ECDIS.
- VTG – Course Over Ground and Ground Speed
- Chứa course over ground (theo true và magnetic) và ground speed (knots, km/h).
- Autopilot, radar, ECDIS thường sử dụng VTG để có dữ liệu COG/SOG “sạch”, tách biệt khỏi thông tin vị trí.
- Trong một số cấu hình, VTG được dùng làm nguồn tham chiếu tốc độ cho hệ thống điều khiển hướng khi log tốc độ bị lỗi.
- ZDA – Time & Date
- Cung cấp thời gian UTC chuẩn, ngày, tháng, năm và thông tin offset múi giờ (thường để 00,00 trong hàng hải).
- Được dùng để đồng bộ thời gian cho VDR, ECDIS, radar, AIS, hệ thống ghi log sự kiện, NTP server nội bộ tàu.
- Độ chính xác thời gian GNSS (ở mức micro giây) là nền tảng cho việc đồng bộ timestamp giữa nhiều hệ thống, hỗ trợ phân tích sự cố sau này.
Việc cấu hình đúng loại sentence, chu kỳ gửi và tốc độ baud là điều kiện tiên quyết để định vị vệ tinh tàu biển hoạt động đồng bộ:
- Chu kỳ gửi:
- 1 Hz (1s): Dùng cho điều hướng thời gian thực, autopilot, radar overlay, ECDIS.
- 2s, 5s, 10s: Dùng cho các hệ thống không cần cập nhật quá nhanh, giảm tải băng thông và CPU.
- Trong các ứng dụng cao cấp (DP – Dynamic Positioning), có thể dùng tần số cao hơn (5–10 Hz) qua giao thức khác (VD: Ethernet, CAN).
- Tốc độ baud:
- 4.800 bps: Chuẩn truyền thống cho đa số thiết bị NMEA 0183.
- 38.400 bps: Thường dùng cho AIS high speed, hoặc khi truyền nhiều sentence cùng lúc.
- Cần đảm bảo tất cả thiết bị trên cùng đường truyền được cấu hình cùng baud rate để tránh lỗi framing.
- Lọc và chọn sentence:
- Chỉ bật những câu cần thiết (RMC, GGA, VTG, ZDA…) để tránh “ngập lụt” dữ liệu trên đường truyền.
- Sử dụng bộ chia/bộ lọc NMEA để phân phối đúng loại dữ liệu cho từng thiết bị (ví dụ: autopilot chỉ cần VTG, HDT; AIS cần RMC, GGA).
Tích hợp định vị vệ tinh tàu biển với AIS, Radar, ECDIS, Autopilot
Trong cấu hình thực tế, định vị vệ tinh tàu biển thường là một trong các nguồn dữ liệu trung tâm của hệ thống INS (Integrated Navigation System). GNSS có thể được kết nối trực tiếp hoặc thông qua bộ tích hợp (data concentrator) đến nhiều thiết bị:
- Kết nối với AIS:
- AIS sử dụng vị trí, SOG, COG từ GNSS để phát thông tin tàu trong các bản tin Class A/B. Nếu GNSS mất tín hiệu hoặc dữ liệu không hợp lệ, AIS phải chuyển sang chế độ dự phòng hoặc ngừng phát vị trí.
- Yêu cầu dữ liệu liên tục, ổn định, không gián đoạn; độ trễ thấp để đảm bảo vị trí phát đi gần với vị trí thực tế.
- Trong nhiều hệ thống, AIS còn nhận thời gian UTC từ GNSS (qua ZDA hoặc nội bộ) để đồng bộ thời gian phát bản tin.
- Kết nối với Radar:
- Radar overlay vị trí tàu lên màn hình, kết hợp dữ liệu GNSS với ảnh radar để hiển thị vị trí tuyệt đối trên nền bản đồ hoặc trên ECDIS.
- Dữ liệu GNSS giúp radar tính toán chính xác vector chuyển động của tàu, hỗ trợ ARPA trong việc dự đoán CPA/TCPA với mục tiêu khác.
- Khi radar được tích hợp với ECDIS, GNSS là nguồn tham chiếu vị trí duy nhất để “neo” ảnh radar vào hệ tọa độ bản đồ.
- Kết nối với ECDIS:
- ECDIS dùng dữ liệu GNSS để hiển thị vị trí tàu trên bản đồ điện tử (ENC), tính toán heading/course, SOG, COG và thể hiện track lịch sử.
- Hỗ trợ tính toán route, waypoint, cross track error (XTE), cảnh báo lệch tuyến, cảnh báo nguy hiểm cạn, vùng cấm.
- Trong cấu hình dual ECDIS, mỗi máy có thể nhận GNSS từ nguồn độc lập hoặc từ cùng một GNSS qua bộ chia, đảm bảo tính dự phòng.
- ECDIS thường kết hợp GNSS với gyro, log tốc độ, AIS, radar để tạo thành bức tranh điều hướng tổng hợp.
- Kết nối với Autopilot:
- Autopilot nhận COG, SOG, waypoint từ ECDIS/INS và dữ liệu GNSS để điều khiển hướng tàu theo track, không chỉ giữ heading đơn thuần.
- Trong chế độ track control, autopilot sử dụng sai lệch XTE do ECDIS tính toán (dựa trên GNSS) để hiệu chỉnh lái, giữ tàu bám sát tuyến hành trình.
- Độ ổn định và độ chính xác của GNSS ảnh hưởng trực tiếp đến chất lượng điều khiển: tín hiệu nhiễu hoặc nhảy vị trí có thể gây dao động lái.
Trong các hệ thống tích hợp nâng cao, GNSS còn được kết hợp với:
- INS/IRS (Inertial Navigation/Reference System) để duy trì định vị khi GNSS bị che khuất hoặc nhiễu.
- Multi-GNSS (GPS, GLONASS, Galileo, BeiDou) nhằm tăng số vệ tinh quan sát, cải thiện độ chính xác và tính sẵn sàng.
- Các nguồn tham chiếu tốc độ khác (Doppler log, water track log) để tách biệt speed over ground và speed through water, phục vụ tối ưu nhiên liệu và phân tích trôi dạt.
Nhờ tích hợp chặt chẽ, định vị vệ tinh tàu biển trở thành nền tảng cho các chức năng điều hướng tự động, tối ưu hành trình, hỗ trợ ra quyết định và nâng cao an toàn hàng hải, đồng thời đáp ứng các yêu cầu của SOLAS, IMO và các chuẩn phân cấp tàu.
Hiệu năng, RAIM, HDOP và integrity trong định vị vệ tinh tàu biển
Hiệu năng định vị trong hàng hải được đánh giá tổng hợp qua độ chính xác, thời gian xác định vị trí và chu kỳ cập nhật. Độ chính xác chịu tác động của sai số vệ tinh, môi trường truyền sóng, nhiễu đa đường và hình học chòm vệ tinh; khi dùng DGNSS hoặc tích hợp GNSS + INS, sai số có thể giảm đáng kể và duy trì ổn định hơn trong giai đoạn mất fix ngắn. Thời gian TTFF (cold, warm, hot start) quyết định khả năng sẵn sàng của thiết bị sau khi khởi động hoặc chuyển sang nguồn dự phòng. Chu kỳ cập nhật 1–10 Hz ảnh hưởng trực tiếp đến độ trễ hiển thị và hiệu quả các thuật toán lọc. Bên cạnh đó, khả năng theo dõi tốc độ cao bảo đảm thiết bị vẫn hoạt động tin cậy trong các tình huống cơ động gấp.
Hiệu năng định vị: độ chính xác, thời gian fix, chu kỳ cập nhật
Hiệu năng của một máy định vị hàng hải không chỉ đo bằng độ chính xác vị trí danh nghĩa, mà còn bởi khả năng duy trì fix, thời gian khởi động, chu kỳ cập nhật dữ liệu và khả năng duy trì chất lượng nghiệm trong các điều kiện khai thác khắc nghiệt (biển động, quay trở nhanh, che khuất cục bộ, nhiễu điện từ trên tàu).
- Độ chính xác vị trí:
- Trong điều kiện tín hiệu tốt, HDOP thấp, thiết bị GNSS hàng hải hiện đại có thể đạt độ chính xác khoảng 2,5 mét (95%). Con số 95% ở đây tương ứng với sai số vị trí nằm trong “vòng tròn tin cậy” 2,5 m trong 95% thời gian, chứ không phải sai số cực đại.
- Độ chính xác chịu ảnh hưởng bởi:
- Sai số quỹ đạo và đồng hồ vệ tinh.
- Sai số tầng điện ly và tầng đối lưu.
- Nhiễu đa đường (multipath) do mặt nước biển, thân tàu, cẩu bãi, siêu cấu trúc phản xạ.
- Hình học chòm vệ tinh (thể hiện qua HDOP, VDOP, PDOP).
- Khi sử dụng DGNSS (Differential GNSS), sai số có thể giảm xuống mức cỡ 0,5–1 m (95%) trong vùng phủ sóng trạm tham chiếu, đặc biệt hữu ích trong vùng cảng, luồng hẹp, khu vực neo đậu dày đặc. DGNSS cung cấp:
- Hiệu chỉnh sai số quỹ đạo và đồng hồ vệ tinh theo thời gian gần thực.
- Hiệu chỉnh một phần sai số tầng điện ly/tầng đối lưu.
- Cảnh báo integrity từ trạm bờ nếu một vệ tinh có sai số bất thường.
- Trong các hệ thống tích hợp (GNSS + INS), độ chính xác vị trí tức thời có thể được duy trì tốt hơn trong thời gian ngắn khi GNSS suy giảm, nhờ INS “cầu nối” quãng thời gian mất fix.
- Thời gian xác định vị trí (Time To First Fix – TTFF):
- Cold start: khoảng 45 giây (khi thiết bị khởi động từ trạng thái hoàn toàn tắt, không có dữ liệu quỹ đạo lưu trữ). Trong thực tế, TTFF cold start phụ thuộc:
- Chất lượng anten và mức tín hiệu ban đầu.
- Khả năng thu đồng thời nhiều hệ thống (GPS, GLONASS, Galileo, BeiDou).
- Việc thiết bị có hỗ trợ AGNSS (Assisted GNSS) qua mạng dữ liệu hay không.
- Warm start: khoảng 30 giây (khi vẫn còn dữ liệu almanac/ephemeris gần đây). Nếu ephemeris còn hiệu lực và vị trí gần với lần tắt máy trước, TTFF có thể giảm xuống chỉ vài giây.
- Hot start (một số thiết bị hỗ trợ): chỉ 1–5 giây khi đồng hồ nội và dữ liệu quỹ đạo vẫn còn rất chính xác, hữu ích khi tàu chỉ tắt nguồn GNSS trong thời gian rất ngắn.
- Trong khai thác, TTFF quan trọng khi:
- Khởi động lại hệ thống sau mất điện toàn tàu.
- Chuyển đổi sang nguồn GNSS dự phòng.
- Thực hiện thử nghiệm, kiểm tra định kỳ thiết bị.
- Cold start: khoảng 45 giây (khi thiết bị khởi động từ trạng thái hoàn toàn tắt, không có dữ liệu quỹ đạo lưu trữ). Trong thực tế, TTFF cold start phụ thuộc:
- Chu kỳ cập nhật dữ liệu:
- Thông thường 1 Hz (1 lần/giây), đủ cho hầu hết ứng dụng hàng hải như điều động, đi luồng, theo dõi hành trình trên ECDIS, radar overlay.
- Một số bộ thu hỗ trợ 5 Hz hoặc 10 Hz, hữu ích khi:
- Tàu chạy tốc độ cao, quay trở gấp, cần hiển thị mượt trên ECDIS.
- Tích hợp với hệ thống điều khiển tự động, DP (Dynamic Positioning) cấp thấp, hoặc các ứng dụng khảo sát.
- Chu kỳ cập nhật ảnh hưởng trực tiếp đến:
- Độ trễ hiển thị vị trí, SOG, COG trên ECDIS, radar, VDR.
- Độ ổn định của các thuật toán lọc (Kalman, lọc trung bình trượt) trong INS/DP.
- Thiết bị phải đảm bảo dữ liệu vị trí, SOG, COG được truyền gần như thời gian thực đến các thiết bị khác qua NMEA 0183, NMEA 2000 hoặc giao diện Ethernet.
- Khả năng theo dõi tốc độ cao:
- Nhiều thiết bị GNSS hàng hải có thể theo dõi tốc độ lên tới 999 knots, đảm bảo ổn định ngay cả khi tàu tăng tốc, đổi hướng nhanh hoặc trong các ứng dụng đặc biệt (tàu cao tốc, xuồng SAR, phương tiện bay biển – sea plane).
- Khả năng này liên quan đến:
- Dải Doppler mà bộ thu có thể xử lý.
- Tốc độ cập nhật bộ lọc theo dõi pha/mã.
- Giới hạn động học (dynamic range) được nhà sản xuất cấu hình để tuân thủ quy định xuất khẩu công nghệ GNSS.
- Trong môi trường hàng hải thông thường, giới hạn 999 knots mang tính “dư thừa an toàn”, đảm bảo bộ thu vẫn hoạt động ổn định trong mọi tình huống khai thác hợp pháp.
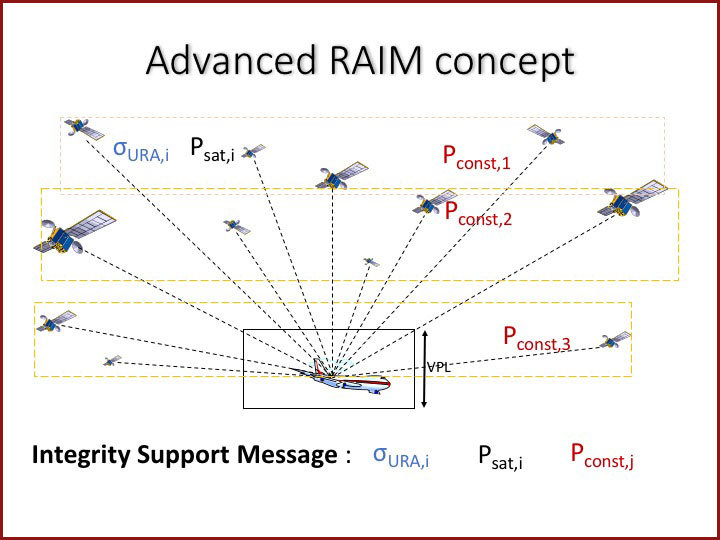
RAIM – cơ chế giám sát độ tin cậy dữ liệu GNSS
Trong định vị vệ tinh tàu biển đạt chuẩn IMO, chỉ có nghiệm vị trí chính xác là chưa đủ. Hệ thống còn phải đánh giá được mức độ tin cậy (integrity) của nghiệm đó, tức là khả năng phát hiện và cảnh báo kịp thời khi dữ liệu GNSS không còn đáp ứng yêu cầu an toàn. RAIM (Receiver Autonomous Integrity Monitoring) là cơ chế cho phép bộ thu tự đánh giá chất lượng dữ liệu mà không phụ thuộc hoàn toàn vào hệ thống mặt đất.
- Nguyên lý RAIM:
- Sử dụng nhiều vệ tinh hơn mức tối thiểu cần cho nghiệm vị trí. Thay vì chỉ cần 4 vệ tinh cho nghiệm 3D, RAIM yêu cầu ít nhất 5 vệ tinh để có thêm một mức dư thừa.
- Thực hiện tính toán dư thừa với các tổ hợp vệ tinh khác nhau. Bộ thu tính nghiệm vị trí nhiều lần, mỗi lần loại bỏ một vệ tinh khác nhau khỏi tập tính toán.
- So sánh kết quả để phát hiện vệ tinh có sai số bất thường. Nếu nghiệm vị trí thay đổi đáng kể khi loại bỏ một vệ tinh cụ thể, vệ tinh đó có thể bị coi là “faulty”.
- RAIM sử dụng các kiểm định thống kê (ví dụ kiểm định chi-bình phương) để so sánh phần dư (residuals) giữa khoảng cách đo được và khoảng cách tính toán từ nghiệm vị trí.
- Điều kiện để RAIM hoạt động hiệu quả:
- Tối thiểu 5 vệ tinh “healthy” để vừa tính vị trí, vừa kiểm tra integrity. Nếu muốn vừa phát hiện vừa cô lập vệ tinh lỗi (Fault Detection and Exclusion – FDE), thường cần ít nhất 6 vệ tinh.
- Hình học vệ tinh phân bố hợp lý để RAIM có thể phát hiện sai lệch. Nếu các vệ tinh nằm gần nhau trên bầu trời, khả năng phân biệt sai số của từng vệ tinh giảm.
- Thông tin trạng thái vệ tinh (health status) phải được giải đoán chính xác từ bản tin điều hướng.
- Thuật toán RAIM phải được hiệu chuẩn với các ngưỡng phù hợp với yêu cầu an toàn hàng hải (ví dụ giới hạn HPL – Horizontal Protection Level).
- RAIM và các mức cảnh báo:
- Trạng thái RAIM thường được hiển thị trên màn hình GNSS và có thể gửi đến hệ thống BAM/INS với các mức:
- SAFE: dữ liệu đáng tin cậy, có thể sử dụng cho navigation. HPL nhỏ hơn giới hạn yêu cầu cho vùng hoạt động (ví dụ vùng ven bờ, cảng, vùng biển khơi).
- CAUTION: độ tin cậy giảm, cần thận trọng khi sử dụng. Có thể do số vệ tinh giảm, HDOP tăng, hoặc RAIM không còn khả năng phát hiện mọi lỗi đơn lẻ.
- UNSAFE: không nên sử dụng dữ liệu GNSS cho điều hướng chính. Hệ thống điều hướng nên chuyển sang nguồn dự phòng (GNSS khác, INS, radar, Loran-C nếu có).
- Trong một số thiết kế, RAIM còn cung cấp:
- Chỉ thị mất integrity tạm thời (loss of integrity) khi số vệ tinh giảm dưới ngưỡng.
- Thời gian ước tính để khôi phục RAIM (dựa trên dự báo quỹ đạo vệ tinh).
- Vai trò RAIM trong hệ thống tích hợp:
- INS, ECDIS, radar overlay, hệ thống DP thường nhận kèm trạng thái RAIM cùng với dữ liệu vị trí. Khi RAIM báo CAUTION hoặc UNSAFE, các hệ thống này có thể:
- Tự động giảm mức tin cậy của nguồn GNSS trong bộ lọc hợp nhất cảm biến.
- Ưu tiên nguồn vị trí khác (GNSS thứ hai, INS, LBL/USBL trong khảo sát ngoài khơi).
- Trong VDR, trạng thái RAIM được ghi lại, giúp phân tích sau sự cố xem dữ liệu GNSS tại thời điểm đó có còn integrity hay không.
- INS, ECDIS, radar overlay, hệ thống DP thường nhận kèm trạng thái RAIM cùng với dữ liệu vị trí. Khi RAIM báo CAUTION hoặc UNSAFE, các hệ thống này có thể:
HDOP và sai số trong thực tế vận hành
HDOP (Horizontal Dilution of Precision) là tham số quan trọng trong định vị vệ tinh tàu biển, phản ánh mức độ “khuếch đại sai số” do hình học vệ tinh gây ra. HDOP không phải là sai số trực tiếp, nhưng là hệ số nhân lên các sai số đo cơ bản để tạo thành sai số vị trí ngang.
- Ý nghĩa HDOP:
- HDOP thấp → vệ tinh phân bố tốt (trải rộng trên bầu trời, có vệ tinh ở nhiều hướng khác nhau) → nghiệm vị trí ổn định, sai số nhỏ.
- HDOP cao → vệ tinh tập trung, góc quan sát hẹp (ví dụ tất cả vệ tinh đều ở cùng một phía của tàu) → sai số tăng, nghiệm vị trí nhạy với nhiễu.
- HDOP thường được kết hợp với sai số đo cơ bản (User Equivalent Range Error – UERE) để ước tính sai số vị trí ngang:
- Sai số ngang 1σ ≈ HDOP × UERE
- Ngưỡng HDOP trong vận hành:
- Trong vận hành, khi HDOP vượt quá một ngưỡng (ví dụ > 4), máy định vị hàng hải thường:
- Phát cảnh báo trên màn hình (visual và/hoặc audible alarm).
- Gửi trạng thái cảnh báo đến BAM/INS, ECDIS, radar.
- Khuyến nghị người vận hành kiểm tra điều kiện tín hiệu, môi trường, vị trí antenna, hoặc chuyển sang nguồn GNSS dự phòng.
- Một số thiết bị cho phép cấu hình ngưỡng HDOP khác nhau cho:
- Đi biển khơi (có thể chấp nhận HDOP cao hơn).
- Đi luồng, ra/vào cảng (yêu cầu HDOP thấp hơn để đảm bảo an toàn).
- Trong vận hành, khi HDOP vượt quá một ngưỡng (ví dụ > 4), máy định vị hàng hải thường:
- Các yếu tố làm thay đổi HDOP:
- Vị trí địa lý của tàu:
- Ở vĩ độ cao, quỹ đạo một số hệ thống GNSS có thể tạo hình học kém hơn, dẫn đến HDOP tăng.
- Ở vùng xích đạo, phân bố vệ tinh thường đều hơn, nhưng vẫn phụ thuộc từng chòm vệ tinh.
- Thời điểm trong ngày (do quỹ đạo vệ tinh):
- Quỹ đạo vệ tinh khiến cấu hình hình học thay đổi theo thời gian, HDOP có thể dao động theo chu kỳ ngày/đêm.
- Các phần mềm lập kế hoạch GNSS chuyên dụng có thể dự báo HDOP theo thời gian để hỗ trợ lập kế hoạch hoạt động chính xác cao.
- Điều kiện che khuất, nhiễu, phản xạ đa đường:
- Các cấu trúc kim loại cao trên tàu, cần cẩu, container xếp cao có thể che khuất một phần bầu trời, làm giảm số vệ tinh hữu dụng và làm xấu hình học.
- Mặt nước biển và thân tàu gây phản xạ đa đường, làm tăng sai số đo khoảng cách, khiến nghiệm vị trí kém ổn định, đặc biệt khi tàu gần cầu cảng, vách đá, công trình ngoài khơi.
- Vị trí địa lý của tàu:
- Ảnh hưởng của HDOP đến khai thác:
- Do đó, cùng một thiết bị định vị vệ tinh tàu biển nhưng chất lượng nghiệm vị trí có thể khác nhau theo thời gian và khu vực khai thác, dù cấu hình phần cứng không đổi.
- Trong thực tế, sỹ quan boong nên:
- Thường xuyên quan sát HDOP, số vệ tinh đang sử dụng, trạng thái RAIM trên màn hình GNSS.
- Đối chiếu vị trí GNSS với radar, mốc địa văn, phao tiêu, đặc biệt khi HDOP tăng hoặc RAIM báo CAUTION.
- Đảm bảo anten GNSS được lắp đặt ở vị trí cao, thoáng, tránh gần anten HF, radar, VSAT để giảm nhiễu và che khuất.
- Trong các hệ thống tích hợp, HDOP còn được dùng làm trọng số trong bộ lọc hợp nhất cảm biến, giúp hệ thống tự động giảm tin cậy của nguồn GNSS khi hình học vệ tinh xấu.
Cấu hình, tiêu chuẩn và lựa chọn thiết bị định vị vệ tinh tàu biển
Cấu hình, tiêu chuẩn và lựa chọn thiết bị định vị vệ tinh tàu biển cần được xem xét như một tổng thể thống nhất giữa kiến trúc kỹ thuật, giao tiếp dữ liệu và tuân thủ pháp lý. Về cấu hình, bộ thu GNSS đa hệ với RF front-end đa băng, DSP và navigation engine hỗ trợ multi-GNSS, RAIM nâng cao và theo dõi nhiều vệ tinh song song giúp tăng độ tin cậy nghiệm PVT trong điều kiện che khuất. Về giao tiếp, thiết bị phải hỗ trợ NMEA 0183/IEC 61162 qua RS422, có nhiều cổng output độc lập, cấu hình linh hoạt baud rate, tập câu NMEA và chu kỳ gửi để phục vụ ECDIS, radar, AIS, autopilot, VDR. Về tiêu chuẩn, cần đáp ứng SOLAS, IMO, IEC, có chứng nhận MED và đăng kiểm, đồng thời xem xét các tiêu chí lựa chọn như khả năng tích hợp INS/BAM, nâng cấp DGNSS/SBAS, độ bền môi trường và tương thích nguồn điện.
Cấu hình bộ thu GNSS đa hệ
Các bộ thu GNSS hàng hải thế hệ mới được thiết kế như một thành phần cốt lõi trong hệ thống điều hướng, không chỉ đơn thuần là bộ thu GPS đơn hệ như trước đây. Về mặt kiến trúc, bộ thu thường bao gồm:
- Khối RF front-end đa băng tần (L1, L2, L5 hoặc tương đương) cho phép thu đồng thời nhiều hệ thống vệ tinh.
- Bộ xử lý tín hiệu số (DSP) chuyên dụng để thực hiện tương quan mã, giải điều chế, theo dõi pha và mã.
- Bộ xử lý định vị (navigation engine) tính toán nghiệm vị trí, vận tốc, thời gian (PVT) và thực hiện các thuật toán toàn vẹn như RAIM.
Về mặt chức năng, các bộ thu GNSS hàng hải hiện đại thường đáp ứng các đặc điểm sau:
- Thu đa hệ vệ tinh:
- Hỗ trợ đồng thời GPS, GLONASS, BeiDou và trong nhiều trường hợp là Galileo, QZSS, SBAS.
- Cho phép cấu hình ưu tiên hệ thống (ví dụ: ưu tiên GPS+Galileo, hoặc GPS+BeiDou) tùy theo khu vực hoạt động và yêu cầu khai thác.
- Khả năng loại bỏ hoặc giảm trọng số một hệ thống nếu phát hiện sai lệch hệ thống (system bias) hoặc cảnh báo từ NOTAM/GNSS warning.
- Theo dõi nhiều vệ tinh song song:
- Số kênh theo dõi (tracking channels) thường từ 32, 72 đến trên 120 kênh, cho phép theo dõi đồng thời nhiều vệ tinh từ tất cả các chòm sao.
- Khả năng duy trì fix 3D ngay cả khi một phần bầu trời bị che khuất bởi cấu trúc thượng tầng, cần cẩu, hoặc địa hình ven bờ.
- Hỗ trợ theo dõi cả tín hiệu mã (code) và pha sóng mang (carrier phase) để cải thiện độ ổn định và giảm nhiễu đa đường (multipath).
- Tự động ưu tiên tổ hợp vệ tinh:
- Thuật toán lựa chọn vệ tinh tối ưu dựa trên hình học chòm vệ tinh (DOP), cường độ tín hiệu (C/N0), lịch sử ổn định và trạng thái sức khỏe vệ tinh.
- Tự động loại bỏ các vệ tinh có sai số quỹ đạo hoặc đồng hồ lớn, dựa trên dữ liệu almanac/ephemeris và thông tin integrity từ hệ thống.
- Hỗ trợ RAIM nâng cao (Advanced RAIM / Fault Detection and Exclusion – FDE) để phát hiện và loại trừ vệ tinh lỗi, đảm bảo nghiệm PVT ổn định.
Việc sử dụng multi-GNSS trong định vị vệ tinh tàu biển mang lại các lợi ích kỹ thuật rõ rệt:
- Tăng số lượng vệ tinh khả dụng, giảm nguy cơ mất fix trong các tình huống:
- Đi qua khu vực cảng với nhiều cần cẩu, cầu cảng cao.
- Hoạt động gần vách núi, eo biển hẹp, khu vực có công trình cao tầng ven bờ.
- Cải thiện HDOP/PDOP:
- Hình học chòm vệ tinh tốt hơn nhờ phân bố vệ tinh từ nhiều hệ thống khác nhau.
- Giảm sai số vị trí ngang, đặc biệt quan trọng khi tích hợp với ECDIS, radar overlay và khi điều động trong vùng nước hẹp.
- Tăng khả năng phát hiện sai số nhờ RAIM:
- Nhiều vệ tinh hơn cho phép RAIM có dư thừa phép đo, nâng cao khả năng phát hiện và loại trừ vệ tinh lỗi.
- Hỗ trợ các mức toàn vẹn khác nhau (integrity levels) phù hợp với yêu cầu của IMO đối với định vị hàng hải.
Cấu hình dữ liệu output và cổng giao tiếp
Trong hệ thống tàu, định vị vệ tinh tàu biển thường đóng vai trò là nguồn tham chiếu vị trí và thời gian cho nhiều thiết bị điều hướng. Việc cấu hình giao tiếp cần được thực hiện có hệ thống, đảm bảo tính tương thích và độ tin cậy:
- Chuẩn giao tiếp:
- NMEA 0183 / IEC 61162 qua RS422 là chuẩn phổ biến cho thiết bị GNSS hàng hải:
- RS422 cho phép truyền khoảng cách xa hơn, chống nhiễu tốt hơn so với RS232 trong môi trường nhiễu điện từ trên tàu.
- Đảm bảo tương thích với AIS, radar, ECDIS, autopilot, VDR và các hệ thống giám sát khác.
- Một số thiết bị hỗ trợ thêm:
- Ethernet (IEC 61162-450) cho tích hợp với mạng LAN trên cầu tàu.
- CAN bus hoặc giao thức riêng cho kết nối với hệ thống INS/BAM hiện đại.
- NMEA 0183 / IEC 61162 qua RS422 là chuẩn phổ biến cho thiết bị GNSS hàng hải:
- Số lượng cổng output:
- Nên có tối thiểu 2–3 cổng GNSS output độc lập:
- Một cổng dành cho ECDIS/radar, một cổng cho AIS/VDR, một cổng cho autopilot hoặc hệ thống dự phòng.
- Giảm phụ thuộc vào bộ chia NMEA trong cấu hình cơ bản, tăng tính sẵn sàng khi một nhánh gặp sự cố.
- Các cổng nên hỗ trợ cấu hình độc lập:
- Baud rate riêng cho từng cổng.
- Tập câu NMEA riêng, phù hợp với yêu cầu từng thiết bị nhận.
- Nên có tối thiểu 2–3 cổng GNSS output độc lập:
- Tốc độ truyền (baud rate):
- Có thể cấu hình 4800, 9600, 19200, 38400 bps hoặc cao hơn tùy thiết bị:
- 4800 bps thường dùng cho các thiết bị cũ, chỉ cần một số câu NMEA cơ bản.
- 38400 bps hoặc cao hơn phù hợp khi truyền nhiều câu NMEA với chu kỳ 1 Hz hoặc nhanh hơn.
- Cần cân nhắc:
- Tổng dung lượng dữ liệu NMEA trên mỗi cổng để tránh tràn băng thông.
- Khả năng xử lý của thiết bị nhận, tránh lỗi buffer overflow hoặc mất câu.
- Có thể cấu hình 4800, 9600, 19200, 38400 bps hoặc cao hơn tùy thiết bị:
- Cấu hình sentence NMEA:
- Chọn loại câu phù hợp:
- GGA: vị trí 3D, chất lượng fix, số vệ tinh, HDOP, độ cao.
- RMC: vị trí, vận tốc, hướng chuyển động, thời gian – thường là câu tối thiểu cho nhiều thiết bị.
- VTG: vận tốc và hướng so với mặt đất, hữu ích cho autopilot.
- ZDA: thời gian và ngày, dùng cho đồng bộ thời gian hệ thống.
- Thiết lập chu kỳ gửi:
- 1 s (1 Hz) cho hầu hết ứng dụng điều hướng thời gian thực.
- 2–10 s cho các hệ thống chỉ cần cập nhật chậm, giảm tải đường truyền.
- Chọn version NMEA:
- Đảm bảo tương thích với thiết bị nhận, đặc biệt với các thiết bị đời cũ chỉ hỗ trợ NMEA 2.x.
- Kiểm tra các trường mở rộng (ví dụ: chỉ thị hệ thống GNSS) để tránh lỗi giải mã.
- Chọn loại câu phù hợp:
Tiêu chuẩn, chứng nhận và yêu cầu pháp lý
Khi lựa chọn thiết bị định vị vệ tinh tàu biển cho tàu SOLAS hoặc tàu hoạt động quốc tế, việc tuân thủ tiêu chuẩn và chứng nhận là yếu tố bắt buộc, không chỉ để đáp ứng kiểm tra pháp lý mà còn để đảm bảo an toàn hàng hải:
- Tiêu chuẩn SOLAS:
- Chương V/18, V/19 về trang thiết bị điều hướng quy định:
- Tàu phải được trang bị phương tiện xác định vị trí bằng vệ tinh hoặc phương tiện tương đương.
- Thiết bị phải được phê duyệt kiểu (type-approved) theo các tiêu chuẩn hiệu năng của IMO.
- Chương V/18, V/19 về trang thiết bị điều hướng quy định:
- Tiêu chuẩn IMO:
- IMO MSC.112(73) – Performance standards for GPS receiver equipment:
- Quy định các yêu cầu về độ chính xác, tính sẵn sàng, tính liên tục và toàn vẹn của thiết bị GPS hàng hải.
- Yêu cầu về giao diện người dùng, cảnh báo lỗi, hiển thị trạng thái định vị.
- Các nghị quyết liên quan đến GNSS, DGNSS, tích hợp INS:
- Định nghĩa yêu cầu đối với hệ thống định vị tích hợp (INS) khi GNSS là một trong các cảm biến đầu vào.
- Quy định cách thức xử lý khi mất tín hiệu GNSS, chuyển sang nguồn dự phòng.
- IMO MSC.112(73) – Performance standards for GPS receiver equipment:
- Tiêu chuẩn IEC:
- IEC 61108-1 – Maritime navigation and radiocommunication equipment and systems – GPS receiver equipment:
- Quy định chi tiết về thử nghiệm hiệu năng, độ chính xác, khả năng làm việc trong điều kiện môi trường hàng hải.
- Yêu cầu về giao diện dữ liệu, định dạng thông tin đầu ra, và khả năng chịu lỗi.
- Các tiêu chuẩn EMC, môi trường, an toàn điện:
- Đảm bảo thiết bị không gây nhiễu và không bị ảnh hưởng quá mức bởi nhiễu điện từ trên tàu.
- Đảm bảo an toàn điện, chống sốc, rung, sương muối, độ ẩm cao và nhiệt độ khắc nghiệt.
- IEC 61108-1 – Maritime navigation and radiocommunication equipment and systems – GPS receiver equipment:
- Chứng nhận đăng kiểm:
- MED (Marine Equipment Directive) cho thiết bị GNSS:
- Thiết bị mang dấu bánh lái (Wheelmark) chứng tỏ đáp ứng yêu cầu của EU đối với thiết bị hàng hải.
- Đăng kiểm quốc tế (DNV, ABS, LR…) và đăng kiểm quốc gia (VR…):
- Chứng nhận type approval cho phép lắp đặt trên tàu thuộc phân cấp của các tổ chức này.
- Hỗ trợ quá trình phê duyệt bản vẽ, nghiệm thu và kiểm tra định kỳ.
Việc thiết bị định vị vệ tinh tàu biển có đầy đủ chứng nhận giúp:
- Đảm bảo tuân thủ quy định pháp lý khi kiểm tra PSC (Port State Control), tránh bị ghi nhận thiếu sót về trang thiết bị điều hướng.
- Giảm rủi ro bị lưu giữ tàu do thiếu hoặc sai chuẩn thiết bị navigation, đặc biệt trên các tuyến quốc tế có kiểm tra nghiêm ngặt.
- Tăng độ tin cậy trong vận hành và tạo thuận lợi cho công tác bảo hiểm hàng hải, giám định tai nạn.
Các tiêu chí quan trọng khi chọn thiết bị định vị vệ tinh tàu biển
Khi lựa chọn định vị vệ tinh tàu biển, cần đánh giá tổng thể trên góc độ kỹ thuật, pháp lý và khai thác, thay vì chỉ nhìn vào một thông số độ chính xác danh nghĩa trong catalogue:
- Khả năng thu đa hệ vệ tinh:
- Hỗ trợ GPS, GLONASS, BeiDou (và có thể Galileo) với số kênh theo dõi đủ lớn:
- Đảm bảo vẫn duy trì fix khi một hệ thống bị suy giảm hoặc tạm ngừng dịch vụ cục bộ.
- Tăng độ ổn định trong nhiều điều kiện khai thác:
- Hành trình đại dương, vùng cực, vùng ven bờ, khu vực đô thị ven biển.
- Hỗ trợ GPS, GLONASS, BeiDou (và có thể Galileo) với số kênh theo dõi đủ lớn:
- Số lượng cổng dữ liệu:
- Tối thiểu 2–3 cổng output GNSS:
- Cho phép phân tách nguồn dữ liệu cho các hệ thống quan trọng, giảm phụ thuộc vào một đường truyền duy nhất.
- Hỗ trợ RS422, cấu hình được baud rate và tập câu NMEA cho từng cổng:
- Đảm bảo linh hoạt khi nâng cấp hoặc thay thế thiết bị khác trên tàu.
- Tối thiểu 2–3 cổng output GNSS:
- Khả năng tích hợp hệ thống:
- Tương thích AIS, radar, ECDIS, autopilot:
- Đảm bảo các hệ thống này nhận được dữ liệu vị trí, vận tốc, thời gian với định dạng và tần suất phù hợp.
- Có cổng kết nối với hệ thống BAM/INS trên bridge hiện đại:
- Hỗ trợ giao thức mạng (IEC 61162-450) hoặc giao thức chuyên dụng theo yêu cầu của nhà sản xuất INS.
- Tương thích AIS, radar, ECDIS, autopilot:
- Khả năng nâng cấp:
- Hỗ trợ DGNSS qua beacon receiver hoặc SBAS khi cần độ chính xác cao:
- Phù hợp với các ứng dụng điều động chính xác, neo đậu, hoạt động ngoài khơi.
- Có thể mở rộng qua bộ phân phối NMEA, module bổ sung:
- Cho phép mở rộng số lượng cổng dữ liệu khi hệ thống trên tàu được nâng cấp, bổ sung thiết bị mới.
- Hỗ trợ DGNSS qua beacon receiver hoặc SBAS khi cần độ chính xác cao:
- Điều kiện môi trường và nguồn cấp:
- Hoạt động ổn định trong dải nhiệt độ, độ ẩm hàng hải:
- Đáp ứng các thử nghiệm rung, sốc, phun sương muối, ngưng tụ ẩm theo tiêu chuẩn IEC/IMO.
- Antenna đạt chuẩn chống nước, chống ăn mòn:
- Cấp bảo vệ IP cao, vật liệu vỏ chống tia UV, muối biển, thích hợp lắp ngoài trời trên cột radar hoặc cột anten.
- Hỗ trợ dải nguồn 12–36V DC, tiêu thụ dòng thấp:
- Giảm tải cho hệ thống nguồn DC trên tàu, dễ dàng tích hợp với hệ thống UPS hoặc nguồn dự phòng.
- Hoạt động ổn định trong dải nhiệt độ, độ ẩm hàng hải:
Những hiểu lầm phổ biến về định vị vệ tinh tàu biển
Những hiểu lầm phổ biến về định vị vệ tinh tàu biển thường xuất phát từ việc đánh đồng thông số danh nghĩa với hiệu năng thực tế và xem GNSS như “trung tâm vũ trụ” của hệ thống navigation. Trong môi trường khai thác trên biển, chất lượng định vị phụ thuộc đồng thời vào vị trí lắp antenna, môi trường tín hiệu (che khuất, nhiễu, multipath) và cách cấu hình – tích hợp với radar, ECDIS, AIS, autopilot, VDR. Một hệ thống có thông số rất đẹp trên catalogue vẫn có thể cho kết quả kém ổn định nếu lắp đặt, đi dây, cấu hình sai. Đồng thời, GNSS chỉ cung cấp vị trí, tốc độ, thời gian; nó không thể thay thế radar, ECDIS, gyro, magnetic compass, log và kinh nghiệm sĩ quan boong trong việc phân tích tình huống, tránh va và đảm bảo an toàn hàng hải.
Độ chính xác danh nghĩa không phải là tất cả
Một hiểu lầm rất phổ biến trong thực tế khai thác là chỉ cần máy định vị hàng hải được nhà sản xuất công bố độ chính xác 2–3 mét là có thể yên tâm về chất lượng. Con số này thường là độ chính xác danh nghĩa trong điều kiện chuẩn: bầu trời quang đãng, không che khuất, không nhiễu, antenna lắp lý tưởng, sử dụng đồng thời nhiều chòm vệ tinh (GPS, GLONASS, Galileo, BeiDou) và thuật toán lọc tối ưu. Khi chuyển sang môi trường khai thác thực tế trên tàu biển, hiệu năng của định vị vệ tinh tàu biển chịu ảnh hưởng bởi nhiều yếu tố kỹ thuật và môi trường mà nếu không hiểu rõ sẽ dẫn đến đánh giá sai về chất lượng thiết bị.
Về mặt kỹ thuật, độ chính xác thực tế phụ thuộc mạnh vào:
- Vị trí và cách lắp antenna GNSS Antenna GNSS cần được lắp ở vị trí có góc nhìn bầu trời rộng, tối thiểu 360° theo phương ngang và càng lớn càng tốt theo phương đứng. Các vấn đề thường gặp:
- Antenna đặt quá gần cấu trúc thượng tầng, cột buồm, cần cẩu, ống khói… gây che khuất vệ tinh theo từng hướng nhất định, làm giảm số vệ tinh khả dụng và làm tăng HDOP/PDOP.
- Antenna đặt gần các nguồn nhiễu RF mạnh như radar X-band/S-band, VSAT, Inmarsat, AIS, VHF, gây suy giảm tỷ số tín hiệu trên nhiễu (SNR), dẫn đến mất fix hoặc fix không ổn định.
- Không tuân thủ khoảng cách tối thiểu giữa các antenna GNSS, AIS, radar, dẫn đến hiện tượng tương hỗ nhiễu và phản xạ đa đường (multipath).
- Lắp antenna không đúng cao độ, không có hệ thống tiếp địa và chống sét phù hợp, làm tăng nguy cơ hư hỏng phần front-end RF và gây suy hao tín hiệu.
- Môi trường tín hiệu: che khuất, nhiễu, phản xạ đa đường Trong môi trường hàng hải, đặc biệt là:
- Khi tàu hoạt động gần cảng, khu vực cầu cảng có cần cẩu, kho bãi, nhà xưởng cao tầng, container xếp cao… tín hiệu GNSS dễ bị che khuất từng phần, dẫn đến số vệ tinh theo dõi giảm, HDOP tăng, độ tin cậy fix giảm.
- Hiện tượng multipath xảy ra khi tín hiệu vệ tinh phản xạ trên mặt nước biển, thân tàu, cấu trúc kim loại rồi mới đến antenna. Máy thu phải xử lý đồng thời tín hiệu trực tiếp và tín hiệu phản xạ, gây sai số vị trí, đặc biệt trong vùng nước hẹp, vịnh kín, khu vực có nhiều công trình ven bờ.
- Nhiễu vô tuyến từ các thiết bị khác trên tàu (inverter, biến tần, thiết bị HF, MF, radar, hệ thống thông tin vệ tinh) có thể làm tăng nền nhiễu, khiến máy thu GNSS khó tách tín hiệu yếu từ vệ tinh, nhất là khi sử dụng băng tần L1/L2.
- Trong một số khu vực, có thể tồn tại nhiễu cố ý (jamming) hoặc giả mạo tín hiệu (spoofing), làm cho máy định vị hàng hải báo vị trí sai lệch lớn mà không có cảnh báo rõ ràng nếu không có cơ chế giám sát chéo.
- Cấu hình hệ thống và tích hợp Bản thân máy thu GNSS có thể hoạt động tốt, nhưng cấu hình không phù hợp với hệ thống navigation tổng thể sẽ làm giảm hiệu quả sử dụng:
- Cấu hình sentence NMEA: Nếu không bật hoặc không truyền đúng các câu như GGA, RMC, VTG, GLL, HDT (tùy hệ thống), các thiết bị như ECDIS, radar ARPA, autopilot sẽ không nhận đủ dữ liệu cần thiết để hiển thị và tính toán.
- Baud rate và số cổng output: Chọn baud rate quá thấp trong khi bật quá nhiều sentence với tần số cập nhật cao (1 Hz, 5 Hz, 10 Hz) có thể gây tràn buffer, mất dữ liệu, hoặc trễ dữ liệu, dẫn đến hiển thị vị trí không mượt, track bị giật.
- Tích hợp với thiết bị khác: Khi GNSS là nguồn tham chiếu cho ECDIS, radar overlay, AIS, VDR, autopilot…, việc không đồng bộ thời gian, không cấu hình đúng nguồn tham chiếu (reference) hoặc không kiểm soát được độ trễ (latency) sẽ làm sai lệch tương quan giữa vị trí, heading, tốc độ và mục tiêu radar/AIS.
- Thiết kế và đi dây: Dây tín hiệu NMEA/RS-422/RS-485 đi chung máng với cáp nguồn công suất lớn, không có shield hoặc không nối đất đúng cách sẽ dễ bị nhiễu, gây lỗi ký tự, mất sentence, hoặc thiết bị nhận hiểu sai dữ liệu.
Hệ quả là một thiết bị GNSS có thông số danh nghĩa rất tốt nhưng:
- Lắp đặt sai vị trí antenna.
- Đi dây không chuẩn, không tách biệt nguồn nhiễu.
- Không cấu hình đúng sentence, baud rate, nguồn tham chiếu.
vẫn có thể cho kết quả không ổn định, thường xuyên mất fix, HDOP cao, sai lệch vị trí tức thời lớn, gây ảnh hưởng trực tiếp đến an toàn điều hướng, đặc biệt trong điều kiện luồng hẹp, cập/rời cầu, hoặc khi chạy trong khu vực mật độ giao thông dày.
GNSS không thay thế hoàn toàn các thiết bị điều hướng khác
Một hiểu lầm khác là định vị vệ tinh tàu biển hiện đại, với khả năng đa chòm vệ tinh, đa tần, SBAS/RTK, có thể thay thế hoàn toàn radar, ECDIS, la bàn, log và các cảm biến truyền thống khác. Về bản chất, GNSS chỉ cung cấp các thông tin sau:
- Vị trí (latitude, longitude, đôi khi cả độ cao so với ellipsoid).
- Tốc độ (SOG – speed over ground) và hướng di chuyển (COG – course over ground) so với mặt đất.
- Thời gian chuẩn (UTC) với độ chính xác cao, dùng làm tham chiếu đồng bộ cho toàn bộ hệ thống.
Các chức năng điều hướng cốt lõi khác lại phụ thuộc vào những thiết bị chuyên dụng:
- Radar
- Phát hiện và theo dõi mục tiêu (tàu, phao, bờ, công trình ngoài khơi) trong mọi điều kiện tầm nhìn, kể cả sương mù, mưa, đêm tối.
- Cho phép đo khoảng cách và phương vị tương đối đến mục tiêu, hỗ trợ tính CPA/TCPA, tránh va theo COLREG.
- Khi kết hợp với dữ liệu GNSS, radar có thể hiển thị overlay lên ECDIS, nhưng bản thân radar vẫn là nguồn cảm biến chủ động, không phụ thuộc vào vệ tinh.
- ECDIS
- Hiển thị bản đồ điện tử chuẩn (ENC), tích hợp thông tin hải đồ, độ sâu, chướng ngại vật, luồng hàng hải, khu vực hạn chế.
- Lập, chỉnh sửa và giám sát route, cảnh báo khi tàu lệch tuyến, đi vào vùng cấm, vùng nước nông.
- Nhận dữ liệu vị trí từ GNSS, nhưng việc phân tích, cảnh báo, hiển thị phụ thuộc vào ECDIS; GNSS chỉ là nguồn tọa độ và thời gian.
- Autopilot
- Điều khiển hướng tàu theo heading hoặc theo track (track control) dựa trên dữ liệu từ gyro compass, GNSS và các cảm biến khác.
- GNSS cung cấp vị trí và COG, nhưng thuật toán điều khiển, bù trôi, bù gió, bù dòng chảy là nhiệm vụ của autopilot.
- Trong chế độ track control, autopilot sử dụng sai lệch giữa vị trí thực tế (từ GNSS) và tuyến đặt trước (từ ECDIS) để hiệu chỉnh hướng lái, nhưng vẫn cần heading chính xác từ gyro.
- Gyro compass, magnetic compass, log
- Gyro compass cung cấp heading ổn định, không phụ thuộc từ trường địa phương, là tham chiếu chính cho radar, autopilot, ECDIS.
- Magnetic compass là nguồn dự phòng quan trọng, đặc biệt khi mất điện hoặc khi gyro gặp sự cố.
- Log cung cấp tốc độ qua nước (STW – speed through water), giúp đánh giá ảnh hưởng của dòng chảy khi so sánh với SOG từ GNSS.
- GNSS có thể tính heading từ vector vận tốc (COG) khi tàu chạy đủ nhanh, nhưng trong điều kiện tốc độ thấp, quay trở, neo đậu, hoặc khi bị trôi, COG không phản ánh heading thực, do đó không thể thay thế gyro.
Trong hệ thống navigation tích hợp hiện đại, định vị vệ tinh tàu biển đóng vai trò là nguồn tham chiếu vị trí và thời gian trung tâm, nhưng không thể thay thế toàn bộ các cảm biến khác. Một số điểm kỹ thuật quan trọng:
- Redundancy (dự phòng): Quy phạm phân cấp và quy định an toàn yêu cầu phải có nhiều nguồn vị trí độc lập (ví dụ: GNSS chính, GNSS dự phòng, radar range & bearing, quan sát trực tiếp, hải đồ giấy) để đối chiếu chéo, tránh phụ thuộc vào một nguồn duy nhất.
- Cross-check: Sĩ quan boong cần thường xuyên so sánh vị trí GNSS với:
- Vị trí radar fix (từ khoảng cách/phương vị đến mốc bờ).
- Vị trí ước tính (DR) dựa trên heading và tốc độ qua nước.
- Vị trí quan sát trực quan (khi điều kiện cho phép).
- Chế độ hỏng hóc: Khi GNSS bị mất fix, mất tín hiệu, hoặc nghi ngờ bị spoofing, hệ thống ECDIS, radar, autopilot phải có khả năng chuyển sang nguồn tham chiếu khác (gyro, log, DR) và cảnh báo rõ ràng cho người trực ca.
- Đào tạo và quy trình: Thuyền viên cần được đào tạo để hiểu giới hạn của GNSS, không “mù quáng” tin vào tọa độ hiển thị trên ECDIS, mà phải kết hợp với quan sát, radar, la bàn, log và kinh nghiệm hàng hải.
Như vậy, GNSS là một thành phần quan trọng trong hệ thống navigation tích hợp, cung cấp dữ liệu nền về vị trí, tốc độ, thời gian, nhưng các chức năng như hiển thị bản đồ, phân tích tình huống giao thông, tránh va, lập tuyến, điều khiển hướng, đánh giá ảnh hưởng gió – dòng chảy… vẫn phụ thuộc vào sự phối hợp của radar, ECDIS, autopilot, gyro, magnetic compass, log và kỹ năng của sĩ quan boong.
FAQ về định vị vệ tinh tàu biển
Hệ thống định vị vệ tinh tàu biển dựa trên việc thu tín hiệu từ nhiều chòm vệ tinh GNSS để xác định vị trí, thời gian và chuyển động của tàu với độ tin cậy cao, không phụ thuộc vào internet. Trong điều kiện tiêu chuẩn, thiết bị GNSS hàng hải hiện đại đạt sai số khoảng vài mét và có thể giảm xuống mức dưới 1–2 m khi dùng các kỹ thuật tăng cường như DGNSS hoặc SBAS, rất hữu ích khi đi luồng hẹp, cập cảng, hoạt động gần công trình biển. Về thuật ngữ, GPS chỉ là một hệ thống trong “hệ sinh thái” GNSS, còn thiết bị trên tàu thường là multi-GNSS, multi-frequency. Hệ thống nguồn được thiết kế theo chuẩn SOLAS với nguồn chính, nguồn khẩn cấp và đôi khi UPS, giúp máy định vị hàng hải vẫn duy trì hoạt động ngay cả khi tàu mất điện lưới.
GPS tàu biển có cần internet không?
Trả lời : Không. Định vị vệ tinh tàu biển hoạt động dựa trên việc thu và xử lý tín hiệu vô tuyến phát từ các vệ tinh GNSS (GPS, GLONASS, Galileo, BeiDou...), hoàn toàn không phụ thuộc vào kết nối internet hay mạng di động. Bộ thu GNSS trên tàu (marine GNSS receiver) chỉ cần:
- Nguồn điện ổn định (thường là 24V DC từ hệ thống điện tàu).
- Anten GNSS lắp ở vị trí cao, thoáng, có tầm nhìn bầu trời rộng 360°.
- Cáp tín hiệu chất lượng tốt, suy hao thấp từ anten về máy thu.
Nguyên lý làm việc: mỗi vệ tinh GNSS phát tín hiệu chứa thông tin quỹ đạo (ephemeris), thời gian chuẩn và mã định danh. Bộ thu trên tàu đo thời gian truyền sóng từ nhiều vệ tinh khác nhau, từ đó tính khoảng cách tới từng vệ tinh và giải bài toán trilateration để xác định:
- Vị trí tàu (vĩ độ, kinh độ, đôi khi cả cao độ so với ellipsoid).
- Thời gian chuẩn GNSS với độ chính xác rất cao.
- Tốc độ và hướng chuyển động (SOG, COG) bằng cách lọc và nội suy vị trí theo thời gian.
Internet chỉ có thể được sử dụng như một kênh bổ trợ trong một số trường hợp:
- Cập nhật firmware, cơ sở dữ liệu, almanac hoặc cấu hình từ xa cho thiết bị GNSS.
- Nhận dữ liệu hiệu chỉnh thời gian thực (RTK, PPP-RTK) qua mạng IP trong các ứng dụng đặc biệt.
- Truyền dữ liệu vị trí về bờ cho hệ thống giám sát đội tàu, VMS, FMS.
Tuy nhiên, ngay cả khi mất hoàn toàn kết nối internet và mạng viễn thông, máy định vị hàng hải GNSS vẫn tiếp tục hoạt động bình thường miễn là còn nguồn điện và anten vẫn thu được tín hiệu vệ tinh. Điều này phù hợp với yêu cầu của SOLAS và các quy phạm hàng hải, vốn đòi hỏi các thiết bị định vị chính không phụ thuộc vào hạ tầng mặt đất dễ bị gián đoạn.
Sai số của máy định vị hàng hải là bao nhiêu?
Trả lời : Trong điều kiện tiêu chuẩn, máy định vị hàng hải GNSS hiện đại (multi-constellation, multi-frequency) thường đạt sai số vị trí ngang khoảng 2–3 mét (95%) đối với dịch vụ định vị chuẩn (Standard Positioning Service). Con số này phụ thuộc vào nhiều yếu tố kỹ thuật và môi trường:
- Số lượng và hình học vệ tinh (DOP – Dilution of Precision): càng nhiều vệ tinh, phân bố tốt trên bầu trời, giá trị HDOP/PDOP càng thấp, độ chính xác càng cao.
- Đa tần (L1/L2/L5…): máy thu hai tần hoặc ba tần có thể mô hình hóa và bù sai số tầng điện ly tốt hơn so với máy thu đơn tần.
- Đa chòm vệ tinh (GPS + GLONASS + Galileo + BeiDou): tăng số vệ tinh khả dụng, giảm nguy cơ che khuất, cải thiện độ tin cậy.
- Môi trường thu tín hiệu: vùng nước trống trải, ít vật cản kim loại lớn sẽ ít bị đa đường (multipath) hơn so với khu vực cảng, cầu cảng, giàn khoan.
- Chất lượng anten và lắp đặt: anten hàng hải chuyên dụng, có choke ring hoặc thiết kế chống multipath, lắp ở vị trí cao, tránh gần radar, VSAT, cột thép lớn.
Khi sử dụng các kỹ thuật tăng cường như DGNSS hoặc SBAS (ví dụ: WAAS, EGNOS, MSAS, GAGAN), sai số có thể giảm đáng kể, thường xuống mức 0,5–1,5 m (95%) tùy hệ thống và vùng phủ. Điều này đặc biệt hữu ích trong các tình huống:
- Đi luồng hẹp, vùng nước hạn chế, nơi khoảng cách an toàn với bờ, cọc tiêu, công trình rất nhỏ.
- Cập cảng, neo đậu chính xác, đặc biệt với tàu lớn, mớn nước sâu, khoảng hở mạn – cầu cảng hạn chế.
- Hoạt động gần giàn khoan, FPSO, cầu cảng dầu khí, nơi yêu cầu kiểm soát vị trí chặt chẽ.
Cần lưu ý phân biệt:
- Sai số tuyệt đối: chênh lệch giữa vị trí GNSS và vị trí “thực” trong hệ quy chiếu WGS-84.
- Sai số tương đối: chênh lệch giữa các lần đo liên tiếp trong thời gian ngắn; thường nhỏ hơn nhiều, quan trọng cho việc giữ vị trí khi neo, DP (Dynamic Positioning).
Trong thực hành hàng hải, sĩ quan boong thường kết hợp dữ liệu GNSS với radar, ECDIS, AIS, đo sâu, quan sát trực tiếp và các mốc địa văn để kiểm tra chéo, không phụ thuộc hoàn toàn vào một nguồn duy nhất, ngay cả khi sai số GNSS đã rất nhỏ.
GNSS và GPS khác nhau như thế nào?
Trả lời : GPS (Global Positioning System) là một hệ thống vệ tinh định vị toàn cầu do Hoa Kỳ xây dựng, vận hành và kiểm soát. GPS bao gồm:
- Phân đoạn không gian: chòm vệ tinh quay quanh Trái Đất, phát tín hiệu định vị.
- Phân đoạn điều khiển: mạng trạm mặt đất theo dõi, điều khiển quỹ đạo, đồng bộ thời gian, cập nhật dữ liệu quỹ đạo.
- Phân đoạn người dùng: các bộ thu GPS trên tàu biển, máy bay, phương tiện, thiết bị cầm tay…
GNSS (Global Navigation Satellite System) là khái niệm tổng quát, bao gồm tất cả các hệ thống vệ tinh định vị toàn cầu và khu vực, ví dụ:
- GPS (Hoa Kỳ).
- GLONASS (Liên bang Nga).
- BeiDou (Trung Quốc).
- Galileo (Liên minh châu Âu).
- Các hệ thống tăng cường khu vực như QZSS (Nhật Bản), NavIC (Ấn Độ) thường được xem là thành phần của “hệ sinh thái” GNSS.
Trong định vị vệ tinh tàu biển, thiết bị GNSS hiện đại thường hỗ trợ multi-GNSS và multi-frequency, mang lại nhiều lợi ích:
- Tăng độ ổn định và độ tin cậy: nếu một chòm vệ tinh bị suy giảm chất lượng hoặc tạm thời không khả dụng ở một vùng nhất định, các chòm khác vẫn đảm bảo đủ số vệ tinh cho định vị.
- Cải thiện độ chính xác: nhiều vệ tinh hơn, hình học tốt hơn, giảm DOP, kết hợp với đa tần giúp giảm sai số tầng điện ly.
- Khả năng chống nhiễu và spoofing tốt hơn: một số thiết bị có thể so sánh tín hiệu từ nhiều hệ thống để phát hiện bất thường.
Về mặt thuật ngữ, có thể hiểu:
- “Máy GPS”: cách gọi quen thuộc, nhưng thường chỉ một phần của GNSS.
- “Máy GNSS”: chính xác hơn về mặt kỹ thuật, vì hầu hết thiết bị hàng hải hiện đại đều thu được nhiều hệ thống vệ tinh, không chỉ GPS.
Có cần dùng DGNSS cho tàu biển không?
Trả lời: DGNSS (Differential GNSS) không bắt buộc cho mọi loại tàu và mọi vùng hoạt động, nhưng là một công cụ quan trọng khi yêu cầu độ chính xác và độ tin cậy cao. Nguyên lý DGNSS: một hoặc nhiều trạm tham chiếu đặt trên bờ tại vị trí đã biết rất chính xác, so sánh vị trí GNSS đo được với vị trí thực, tính toán sai số và phát đi tín hiệu hiệu chỉnh cho các tàu trong vùng phủ.
Các tình huống nên cân nhắc trang bị DGNSS hoặc beacon receiver cho định vị vệ tinh tàu biển:
- Đi luồng hẹp, vùng nước hạn chế, kênh đào, khu vực có mật độ giao thông cao.
- Cập cảng, neo đậu chính xác, đặc biệt với tàu container, tàu dầu, tàu LNG kích thước lớn.
- Hoạt động gần công trình biển, giàn khoan, cầu cảng, đường ống, cáp ngầm.
- Các hoạt động chuyên dụng: khảo sát thủy đạc, đặt phao, lắp đặt cấu kiện ngoài khơi, hỗ trợ DP.
Lợi ích kỹ thuật của DGNSS:
- Giảm sai số hệ thống: bù sai số quỹ đạo, đồng hồ vệ tinh, tầng điện ly, tầng đối lưu trong phạm vi vùng phủ trạm tham chiếu.
- Cải thiện tính lặp lại vị trí: vị trí neo, vị trí tuyến luồng được tái lập chính xác hơn giữa các lần hành trình.
- Tăng độ tin cậy: nhiều hệ thống DGNSS hàng hải sử dụng tần số MF beacon, ít phụ thuộc vào hạ tầng viễn thông thương mại.
Tuy nhiên, việc sử dụng DGNSS cũng cần lưu ý:
- Phụ thuộc vào vùng phủ của trạm tham chiếu hoặc dịch vụ SBAS; không phải khu vực nào cũng có.
- Cần anten, bộ thu và cấu hình phù hợp (chọn đúng nguồn hiệu chỉnh, đúng định dạng RTCM, đúng hệ quy chiếu).
- Không thay thế hoàn toàn các phương pháp dẫn tàu truyền thống; vẫn phải kết hợp radar, ECDIS, mốc địa văn, hoa tiêu.
Trong nhiều quy phạm và hướng dẫn, DGNSS được khuyến nghị cho tàu hoạt động trong vùng nước hạn chế, nhưng không phải lúc nào cũng là yêu cầu bắt buộc. Chủ tàu, thuyền trưởng và bộ phận kỹ thuật cần đánh giá rủi ro, loại hình khai thác, tuyến hành trình để quyết định mức độ đầu tư phù hợp.
Định vị vệ tinh tàu biển có hoạt động được khi mất điện lưới tàu không?
Trả lời: Định vị vệ tinh tàu biển cần nguồn DC (thường 24V) để hoạt động; bản thân thiết bị không có nguồn độc lập lâu dài. Trong cấu hình an toàn, nguồn cho thiết bị GNSS thường được cấp từ:
- Hệ thống nguồn chính 24V DC của tàu, qua cầu chì hoặc MCB riêng.
- Hệ thống nguồn khẩn cấp (emergency switchboard) theo yêu cầu SOLAS, đảm bảo duy trì cấp điện cho các thiết bị navigation thiết yếu trong thời gian quy định khi mất điện lưới chính.
- UPS hoặc bộ nguồn dự phòng cục bộ cho thiết bị định vị, ECDIS, radar, AIS để tránh reset, mất tín hiệu khi chuyển nguồn.
Khi mất điện lưới chính, nếu hệ thống được thiết kế đúng chuẩn, thiết bị GNSS sẽ:
- Tự động chuyển sang nguồn khẩn cấp hoặc UPS mà không bị ngắt quãng đáng kể.
- Tiếp tục duy trì tín hiệu vị trí cho ECDIS, radar, AIS, VDR và các hệ thống khác thông qua NMEA 0183, NMEA 2000 hoặc IEC 61162-450.
- Giảm nguy cơ mất nhận thức tình huống (situational awareness) của ca trực boong trong giai đoạn tàu gặp sự cố điện.
Một số điểm kỹ thuật cần lưu ý trong thiết kế và vận hành:
- Đấu nguồn kép: nhiều thiết bị GNSS hàng hải cho phép đấu hai nguồn DC (main + emergency) với mạch OR-ing để tự động chọn nguồn còn tốt.
- Bảo vệ quá áp, ngược cực, nhiễu: đảm bảo thiết bị không bị hỏng khi có sự cố trên lưới DC của tàu.
- Kiểm tra định kỳ: thử chuyển nguồn, kiểm tra thời gian duy trì của UPS, đảm bảo khi mất điện thực tế thiết bị vẫn hoạt động như thiết kế.
Yêu cầu của SOLAS đối với thiết bị navigation thiết yếu (trong đó có hệ thống định vị vệ tinh) là phải được cấp điện từ cả nguồn chính và nguồn khẩn cấp, với thời gian duy trì tối thiểu tùy theo loại tàu và dung tích. Do đó, trong thiết kế hệ thống điện tàu mới hoặc cải hoán, việc bố trí nguồn cho GNSS, ECDIS, radar, AIS, VDR luôn được xem là hạng mục quan trọng trong đánh giá an toàn và phê duyệt của đăng kiểm.
Cảm ơn bạn đã đọc bài,
Bạn có thể tham khảo thêm về sản phẩm cụ thể tại đây
Nếu bạn cần thêm thông tin hỗ trợ, hãy liên hệ chúng tôi theo :
Thông tin liên hệ và kết nối
MarineZone
Địa chỉ: Số 144, tổ 6, phường Phú Diễn, Hà Nội
Điện thoại/Zalo: 0865.085.436
Website: marinezone.vn
Các mạng xã hội chính thức:










.png)




