










.png)

Máy Đo Tốc Độ Tàu Biển- MarineZone

DS99 Speed log
Khái niệm Máy Đo Tốc Độ Tàu Biển Speed Log và vai trò của đo tốc độ Speed Log
Máy đo tốc độ tàu biển Speed Log (Speed and Distance Measuring Equipment – SDME) là một hệ thống đo lường – điều khiển chuyên dụng, có nhiệm vụ không chỉ hiển thị tốc độ tức thời của tàu mà còn tích lũy quãng đường, cung cấp dữ liệu chuẩn hóa cho toàn bộ mạng lưới thiết bị hàng hải trên tàu. Ở góc độ kỹ thuật, khi nói đến đo tốc độ Speed Log là đang nói đến một chuỗi chức năng khép kín: cảm biến – xử lý tín hiệu – hiệu chuẩn – chuẩn hóa dữ liệu – phân phối dữ liệu đến các thiết bị Nav & Comm và hệ thống quản lý khai thác.

Trong các tiêu chuẩn của IMO, SOLAS và các tổ chức đăng kiểm (Class), Speed Log được phân loại là thiết bị an toàn hàng hải trọng yếu (navigational safety equipment). Điều này có nghĩa là yêu cầu về độ chính xác, độ tin cậy, khả năng làm việc liên tục và khả năng tích hợp của hệ thống phải đáp ứng các quy phạm nghiêm ngặt, tương đương với Radar, ECDIS, AIS hay Gyro Compass.
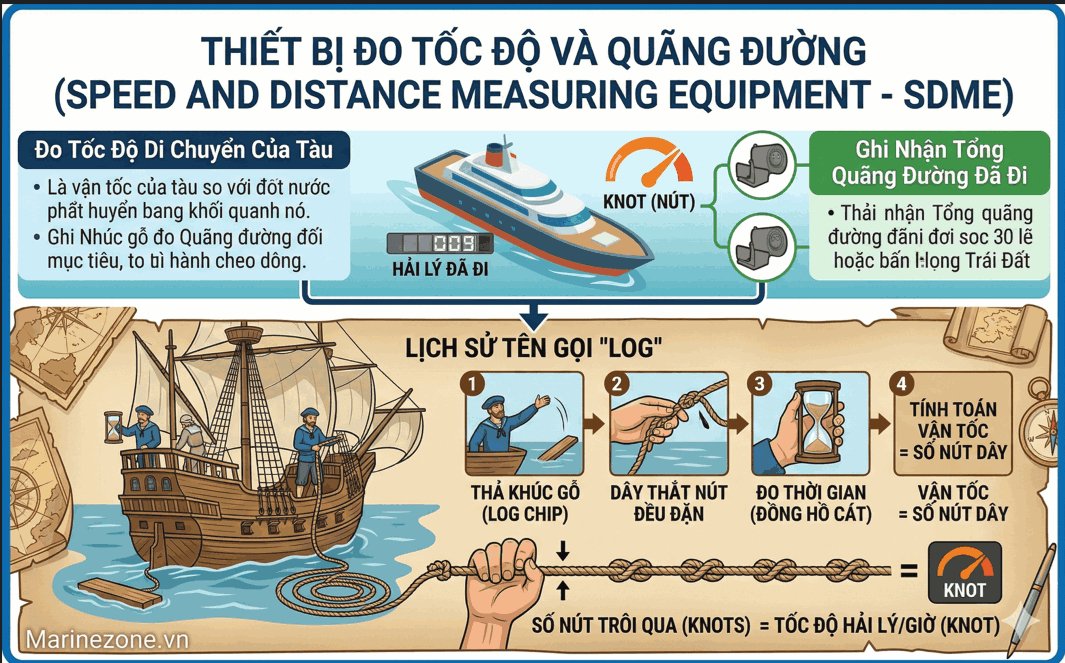
Đơn vị đo chuẩn trong đo tốc độ Speed Log là knot (KT), tương đương 1 hải lý/giờ. Tất cả các thuật toán nội suy, tuyến tính hóa, hiệu chuẩn và kiểm định của máy đo tốc độ tàu biển Speed Log đều dựa trên đơn vị này. Ở mức hệ thống, dữ liệu tốc độ thường được xuất ra theo chuẩn NMEA 0183 hoặc NMEA 2000 với các câu lệnh như VHW, VBW, VLW, trong đó tốc độ được tính bằng knot để đảm bảo tính tương thích quốc tế.
Về bản chất, Speed Log là một cảm biến nền tảng trong hệ thống Navigation & Communication (Nav & Comm) của tàu. Dữ liệu từ máy đo tốc độ Speed Log được phân phối đến nhiều thiết bị và hệ thống khác nhau:
- Radar/ARPA: sử dụng STW để tính toán vector chuyển động tương đối, CPA/TCPA, hỗ trợ thuật toán tránh va theo COLREG.
- ECDIS: kết hợp SOG, COG và dữ liệu bản đồ điện tử để hiển thị track, tính ETA, giám sát sai lệch tuyến hành trình.
- AIS: phát quảng bá tốc độ tàu (thường là SOG) cho các tàu khác và hệ thống bờ, phục vụ giám sát giao thông hàng hải.
- VDR: ghi lại lịch sử tốc độ và quãng đường, phục vụ điều tra tai nạn, tranh chấp pháp lý và phân tích an toàn.
- Autopilot/Track Control: sử dụng tốc độ để tối ưu thuật toán điều khiển hướng, giảm dao động, hạn chế quá điều khiển (overshoot).
- Hệ thống quản lý năng lượng và tối ưu nhiên liệu: phân tích mối tương quan giữa tốc độ, tải máy, điều kiện môi trường và tiêu hao nhiên liệu.
Khi dữ liệu đo tốc độ Speed Log bị sai lệch (do lắp đặt, fouling, trôi hiệu chuẩn, nhiễu điện từ…), toàn bộ chuỗi tính toán phía sau đều bị ảnh hưởng. Hậu quả có thể bao gồm:
- Tính sai CPA/TCPA, dẫn đến đánh giá sai nguy cơ va chạm.
- Lập kế hoạch hành trình và ETA không chính xác, gây chậm trễ hoặc tăng chi phí nhiên liệu.
- Ghi nhận dữ liệu VDR không khớp với thực tế, gây khó khăn cho điều tra tai nạn.
- Tối ưu nhiên liệu sai lệch, dẫn đến vận hành ngoài “sweet spot” của chân vịt và máy chính.
Về mặt lịch sử, khái niệm “Log” bắt nguồn từ phương pháp đo tốc độ thô sơ: thủy thủ dùng một khúc gỗ buộc dây có thắt nút, thả trôi phía sau tàu và đếm số nút dây trôi qua trong một khoảng thời gian xác định bằng đồng hồ cát. Số nút đếm được trong khoảng thời gian chuẩn này chính là tốc độ tính theo “knot”. Cách làm này là tiền thân của đo tốc độ Speed Log hiện đại, đồng thời giải thích nguồn gốc của đơn vị knot.
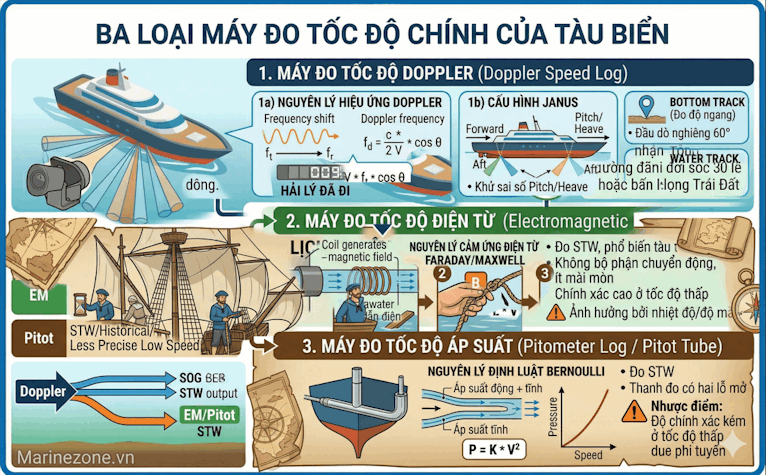
Từ phương pháp cơ học đơn giản, công nghệ Speed Log đã phát triển thành các hệ thống điện tử chính xác cao dựa trên nhiều nguyên lý vật lý khác nhau:
- Điện từ học (Electromagnetic Log – EM Log): đo điện áp cảm ứng sinh ra khi nước biển (môi trường dẫn điện) chuyển động qua trường từ, từ đó suy ra tốc độ tương đối giữa tàu và khối nước xung quanh.
- Hiệu ứng Doppler (Doppler Log): phát sóng âm hoặc siêu âm xuống nước, đo độ dịch tần số của tín hiệu phản xạ từ hạt lơ lửng trong nước (water track) hoặc từ đáy biển (bottom track) để tính vận tốc tương đối.
- Động lực học chất lỏng: một số cấu hình cảm biến sử dụng áp suất động, chênh áp hoặc đặc tính dòng chảy quanh thân tàu để suy ra tốc độ, thường dùng như kênh tham chiếu hoặc cho các ứng dụng đặc thù.
Trong hàng hải hiện đại, khi nói đến đo tốc độ Speed Log, cần phân biệt rõ hai hệ quy chiếu quan trọng là STW và SOG. Việc hiểu sâu hai khái niệm này là điều kiện tiên quyết để khai thác đúng chức năng của máy đo tốc độ tàu biển Speed Log và tối ưu hóa toàn bộ chuỗi đo lường – điều khiển.
STW – Speed Through Water (Tốc độ qua nước)
STW – Speed Through Water là vận tốc của tàu so với khối nước xung quanh thân tàu. Đây là đại lượng mang tính “thủy động lực học”, phản ánh trực tiếp tương tác giữa thân tàu, chân vịt và môi trường nước. STW là thông số bắt buộc phải cung cấp cho Radar/ARPA để:
- Tính toán vector chuyển động tương đối giữa tàu mình và mục tiêu.
- Xác định CPA/TCPA chính xác trong điều kiện có dòng chảy.
- Hỗ trợ thuật toán tránh va theo COLREG, đặc biệt trong chế độ ARPA auto tracking.
Phần lớn các hệ thống EM Log và Doppler Log (Water Track) được thiết kế xoay quanh nhiệm vụ đo STW. Một số đặc điểm kỹ thuật quan trọng của STW:
- Phụ thuộc mạnh vào điều kiện dòng chảy cục bộ: nếu tàu chạy ngược dòng, STW có thể lớn trong khi SOG nhỏ; ngược lại khi chạy xuôi dòng.
- Liên quan trực tiếp đến lực cản và tiêu hao nhiên liệu: với cùng STW, lực cản thân tàu và tải máy chính gần như tương đương, bất kể dòng chảy.
- Nhạy với lắp đặt cảm biến: vị trí lắp transducer, ảnh hưởng của bọt khí, nhiễu dòng chảy quanh thân tàu có thể gây sai số đáng kể nếu thiết kế không chuẩn.
Trong thực tế vận hành, STW thường được sử dụng cho:
- Điều chỉnh công suất máy chính để đạt tốc độ qua nước mong muốn.
- Đánh giá hiệu quả chân vịt, tình trạng fouling thân tàu.
- Phân tích hiệu suất tuyến hành trình trong điều kiện thủy văn phức tạp.
SOG – Speed Over Ground (Tốc độ so với đất)
SOG – Speed Over Ground là vận tốc của tàu so với bề mặt Trái Đất hoặc đáy biển, đã bao gồm ảnh hưởng của dòng chảy, gió, thủy triều. Về mặt toán học, có thể coi:
Vector SOG = Vector STW + Vector dòng chảy (current)
SOG thường được đo bằng GPS hoặc Doppler Log (Bottom Track). Đây là thông số cốt lõi để:
- Lập kế hoạch hành trình (passage planning) và tính ETA.
- Giám sát tiến độ hành trình thực tế so với kế hoạch.
- Đánh giá ảnh hưởng của dòng chảy và điều kiện môi trường lên hiệu quả khai thác.
Một số đặc điểm kỹ thuật của SOG:
- Độc lập với đặc tính thủy động lực học cục bộ: SOG phản ánh chuyển động thực của tàu trên bề mặt Trái Đất, phù hợp cho mục đích định vị và dẫn đường chiến lược.
- Phụ thuộc vào chất lượng tín hiệu định vị: với GPS, sai số SOG có thể tăng trong vùng che khuất vệ tinh, vùng nhiễu hoặc khi sử dụng chế độ dự đoán (dead reckoning).
- Đặc biệt quan trọng trong vùng nước hạn chế: khi điều động gần cảng, luồng hẹp, cầu cảng, SOG nhỏ nhưng chính xác giúp kiểm soát quán tính tàu.
Trong các hệ thống ECDIS và AIS, SOG thường được sử dụng làm tham số chính để hiển thị và trao đổi thông tin tốc độ, vì nó gắn trực tiếp với chuyển động của tàu trên bản đồ điện tử và trên bề mặt Trái Đất.
Ý nghĩa của việc phân biệt STW và SOG trong khai thác Speed Log
Việc hiểu rõ sự khác biệt giữa STW và SOG là nền tảng để khai thác đúng chức năng của máy đo tốc độ tàu biển Speed Log và tối ưu hóa toàn bộ chuỗi đo tốc độ Speed Log từ lắp đặt, vận hành đến bảo trì. Một số khía cạnh chuyên môn quan trọng:
- Thiết kế và lắp đặt: cần xác định rõ mục tiêu chính là đo STW (EM Log, Doppler Water Track) hay SOG (Doppler Bottom Track, GPS) để lựa chọn vị trí lắp transducer, góc phát sóng, độ sâu đo phù hợp.
- Cấu hình hệ thống: trên Radar/ARPA, phải đảm bảo nguồn tốc độ đầu vào là STW; trên ECDIS và AIS, ưu tiên SOG; trên VDR, nên ghi nhận cả hai nếu có.
- Hiệu chuẩn và kiểm định: quy trình sea trial thường so sánh STW của Speed Log với SOG từ GPS trong điều kiện dòng chảy đã biết hoặc có thể ước lượng, từ đó hiệu chỉnh hệ số tuyến tính và offset.
- Phân tích hiệu quả khai thác: so sánh STW và SOG cho phép ước lượng vector dòng chảy, đánh giá lựa chọn tuyến hành trình, tối ưu tốc độ kinh tế và thời gian đến.
- Đào tạo thuyền viên: sĩ quan boong cần nắm rõ ý nghĩa từng loại tốc độ để không nhầm lẫn khi ra quyết định điều động, đặc biệt trong điều kiện thời tiết xấu hoặc vùng nước hạn chế.
Khi chuỗi đo tốc độ Speed Log được thiết kế, lắp đặt, hiệu chuẩn và khai thác đúng chuẩn, dữ liệu tốc độ trở thành một “trục tham chiếu” tin cậy cho toàn bộ hệ thống Nav & Comm, góp phần trực tiếp vào an toàn hàng hải, tối ưu chi phí vận hành và tuân thủ các yêu cầu pháp lý quốc tế.
Quy định SOLAS, IMO và yêu cầu pháp lý liên quan đến đo tốc độ Speed Log
Trong môi trường hàng hải quốc tế, Máy đo tốc độ tàu biển Speed Log không phải là lựa chọn tùy ý mà là yêu cầu bắt buộc theo Công ước SOLAS Chương V, gắn trực tiếp với trách nhiệm pháp lý của chủ tàu, thuyền trưởng và nhà thiết kế. Các quy định này được xây dựng nhằm đảm bảo rằng mọi tàu hoạt động trên biển đều có khả năng xác định tốc độ và quãng đường một cách tin cậy, phục vụ an toàn điều động, điều hướng, quản lý rủi ro va chạm, mắc cạn và hỗ trợ điều tra tai nạn.
Theo Quy định 19.2.3.4 và 19.2.9.2 SOLAS Chương V:
Tàu từ 300 GT trở lên và mọi tàu khách: phải được trang bị thiết bị đo tốc độ và quãng đường qua nước (Speed Through Water – STW). Điều này đồng nghĩa, mọi tàu thương mại cỡ trung và lớn đều bắt buộc phải có hệ thống Speed Log đáp ứng chuẩn đo tốc độ Speed Log theo STW, cung cấp liên tục dữ liệu tốc độ dọc trục tàu phục vụ điều động, tính toán khoảng cách dừng tàu, lập kế hoạch hành trình và hiệu chỉnh dữ liệu từ các cảm biến khác (ARPA, AIS, VDR).
Tàu từ 50.000 GT trở lên: phải được trang bị thêm thiết bị đo tốc độ so với đất (Speed Over Ground – SOG) theo cả hướng dọc tàu và hướng ngang tàu (athwartships). Yêu cầu này đặc biệt quan trọng đối với tàu lớn, tàu chở dầu, tàu container cỡ lớn khi điều động cập/rời cầu, đi trong luồng hẹp, khu vực nước nông hoặc vùng có dòng chảy mạnh, nơi sai lệch giữa STW và SOG có thể dẫn đến rủi ro va chạm, trôi ngang và mắc cạn.
Ủy ban An toàn Hàng hải IMO (MSC) đã làm rõ trong MSC.334(90) và MSC.1/Circ.1429 rằng đối với tàu ≥ 50.000 GT, yêu cầu trên phải được đáp ứng bằng hai thiết bị độc lập. Điều này có ý nghĩa kỹ thuật và pháp lý rất lớn:
Không được dùng một máy Doppler duy nhất vừa đo STW vừa đo SOG để thay thế cho hai hệ thống riêng biệt. Lý do là hỏng hóc, lỗi phần mềm hoặc sai số hệ thống của một thiết bị duy nhất có thể làm mất đồng thời cả hai nguồn dữ liệu tốc độ, đi ngược lại triết lý redundancy trong thiết kế an toàn hàng hải.
Phải có một thiết bị đo STW độc lập (thường là EM Log hoặc Doppler Water Track) và một thiết bị đo SOG đa hướng độc lập (thường là Doppler Bottom Track có kênh ngang). Hai hệ thống này phải có nguồn cấp điện, đường tín hiệu, giao diện hiển thị và kết nối tới các hệ thống khác (VDR, ECDIS, AIS, radar) được bố trí sao cho hỏng một hệ thống không làm suy giảm chức năng của hệ thống còn lại.
Đối với các chủ tàu, kỹ sư thiết kế và nhà máy đóng tàu, việc hiểu đúng yêu cầu này là yếu tố sống còn để tránh rủi ro không được đăng kiểm, bị từ chối cấp Giấy chứng nhận phù hợp SOLAS hoặc phải cải hoán tốn kém sau khi tàu đã bàn giao. Trong mọi hồ sơ kỹ thuật, bản vẽ hệ thống và biên bản thử nghiệm, nội dung liên quan đến đo tốc độ Speed Log luôn được các tổ chức phân cấp (Class) như DNV, ABS, LR, NK, BV kiểm tra rất kỹ, bao gồm:
- Sơ đồ khối hệ thống Speed Log, thể hiện rõ phân tách STW/SOG và tính độc lập của từng thiết bị.
- Bản vẽ bố trí đầu dò (transducer) trên thân tàu, độ sâu lắp đặt, khoảng cách tới sống tàu, chân vịt, thruster để giảm nhiễu bong bóng và nhiễu dòng chảy.
- Danh mục thiết bị, chứng chỉ Type Approval theo IMO/IEC, chứng chỉ MED hoặc tương đương.
- Biên bản thử nghiệm tại xưởng (FAT) và trên tàu (HAT/SAT), kèm kết quả so sánh với tốc độ tham chiếu (GPS, đo chạy thử trên tuyến chuẩn).
Bên cạnh yêu cầu trang bị, tiêu chuẩn hiệu suất kỹ thuật cho thiết bị Speed Log được quy định trong IMO MSC.96(72) và A.824(19). Các tiêu chuẩn này không chỉ đặt ra ngưỡng sai số cho phép mà còn quy định chi tiết về dải tốc độ làm việc, khả năng chịu điều kiện môi trường, yêu cầu về hiển thị, cảnh báo và giao diện dữ liệu.
Một hệ thống đo tốc độ Speed Log đạt chuẩn phải đáp ứng tối thiểu:
Độ chính xác tốc độ: sai số không vượt quá 2% vận tốc thực hoặc 0.2 knot (lấy giá trị lớn hơn) đối với hiển thị số. Điều này áp dụng cho toàn bộ dải tốc độ được quy định trong tiêu chuẩn, thường từ tốc độ rất thấp khi điều động (khoảng 0.1–2 knot) đến tốc độ hành trình. Hệ thống phải được hiệu chuẩn (calibration) và có khả năng bù sai số do lắp đặt, độ nghiêng thân tàu và đặc tính thủy động học.
Độ sâu làm việc: đo STW chính xác khi mực nước dưới lườn (UKC) > 3 m, đo SOG chính xác khi UKC > 2 m. Với Doppler Bottom Track, khi UKC nhỏ hơn giới hạn này, tín hiệu phản xạ từ đáy có thể bị suy giảm hoặc nhiễu, dẫn đến mất khóa đáy (bottom lock) và hệ thống phải có cơ chế cảnh báo hoặc tự động chuyển chế độ đo phù hợp.
Điều kiện biển: vẫn duy trì độ chính xác khi tàu lắc ngang (roll) ±10° và lắc dọc (pitch) ±5°. Điều này đòi hỏi thuật toán xử lý tín hiệu phải bù được ảnh hưởng của chuyển động sáu bậc tự do của tàu, sử dụng dữ liệu từ cảm biến góc nghiêng hoặc tích hợp với hệ thống MRU/IMU khi cần thiết.
Ở góc độ kỹ thuật, khi thiết kế, lựa chọn, lắp đặt và nghiệm thu hệ thống máy đo tốc độ tàu biển Speed Log, cần xem xét đồng thời các nhóm yếu tố sau dưới lăng kính tuân thủ SOLAS và tiêu chuẩn IMO:
Cấu hình đầu dò (transducer configuration): lựa chọn giữa EM Log, Doppler Water Track, Doppler Bottom Track hoặc giải pháp kết hợp. Với tàu ≥ 50.000 GT, thường cấu hình như sau:
- 01 EM Log hoặc Doppler Water Track chuyên đo STW dọc trục tàu.
- 01 Doppler Bottom Track đa kênh, đo SOG dọc và ngang (athwartships), có khả năng làm việc ở vùng nước nông theo yêu cầu UKC.
Vị trí lắp đặt: phải được tối ưu để giảm nhiễu thủy động, tránh vùng xoáy sau bulbous bow, chân vịt, thruster, sea chest. Thường lắp ở phần đáy tàu, gần sống tàu, phía trước trọng tâm tàu, với góc nghiêng phù hợp để chùm sóng siêu âm quét đúng vùng nước hoặc đáy theo thiết kế của nhà sản xuất.
Thuật toán xử lý và hiệu chuẩn: hệ thống phải có khả năng:
- Lọc nhiễu do bọt khí, sóng, chuyển động lắc ngang/lắc dọc.
- Bù sai số do độ nghiêng thân tàu (trim, list) và tốc độ thấp.
- Cho phép nhập hệ số hiệu chỉnh (calibration factor) sau khi chạy thử trên biển, được ghi nhận trong biên bản nghiệm thu và tài liệu kỹ thuật.
Giao diện dữ liệu và tích hợp hệ thống: Speed Log phải cung cấp dữ liệu theo chuẩn IEC/IMO, thường là:
- Giao thức NMEA 0183 hoặc IEC 61162-1/2 cho các câu tốc độ (VDV, VBW, VHW, v.v.).
- Ngõ ra xung (pulse) cho hệ thống tính quãng đường (distance run) và các thiết bị kế thừa.
- Kết nối tới VDR, ECDIS, radar, AIS, autopilot, hệ thống giám sát năng lượng để đảm bảo tính nhất quán dữ liệu tốc độ trong toàn bộ mạng lưới thiết bị trên tàu.
Yêu cầu hiển thị và cảnh báo: theo MSC.96(72) và A.824(19), thiết bị phải:
- Hiển thị rõ ràng tốc độ, đơn vị (knot), hướng đo (dọc/ngang) và trạng thái làm việc.
- Có cảnh báo khi mất tín hiệu, vượt giới hạn sai số, mất khóa đáy hoặc điều kiện làm việc ngoài dải cho phép.
- Cho phép thuyền viên nhận biết nhanh nguồn tốc độ đang sử dụng (STW hay SOG) để tránh nhầm lẫn trong điều động.
Ở khía cạnh pháp lý, máy đo tốc độ tàu biển Speed Log không chỉ là câu chuyện kỹ thuật nội bộ mà còn là vấn đề chứng nhận quốc tế và trách nhiệm trong điều tra tai nạn:
- Thiết bị phải có Type Approval theo tiêu chuẩn IMO/IEC tương ứng, được chấp nhận bởi tổ chức phân cấp và quốc gia treo cờ.
- Việc thay thế, nâng cấp Speed Log phải được cập nhật trong hồ sơ tàu, được Class và Cơ quan đăng kiểm quốc gia phê duyệt, kèm thử nghiệm sau lắp đặt.
- Dữ liệu tốc độ được ghi trong VDR là bằng chứng quan trọng khi phân tích nguyên nhân va chạm, mắc cạn; nếu hệ thống Speed Log không tuân thủ chuẩn hoặc lắp đặt sai, chủ tàu và thuyền trưởng có thể đối mặt với rủi ro pháp lý đáng kể.
Các công nghệ đo tốc độ Speed Log phổ biến trên tàu biển
Hiện nay, ba công nghệ chính được sử dụng trong máy đo tốc độ tàu biển Speed Log là Doppler Speed Log, Electromagnetic Log (EM Log) và Pitometer Log. Mỗi công nghệ dựa trên một nguyên lý vật lý khác nhau (sóng âm, cảm ứng điện từ, áp suất động), kéo theo đặc tính sai số, yêu cầu lắp đặt, hiệu chuẩn và phạm vi ứng dụng riêng. Việc lựa chọn công nghệ phù hợp ảnh hưởng trực tiếp đến chất lượng đo tốc độ Speed Log, độ tin cậy của dữ liệu STW/SOG cung cấp cho ECDIS, autopilot, VDR, AIS, radar ARPA và các hệ thống điều động, tối ưu nhiên liệu trên từng loại tàu.
Máy đo tốc độ tàu biển Doppler – Doppler Speed Log
Doppler Speed Log là công nghệ tiên tiến nhất hiện nay, đặc biệt phổ biến trên tàu lớn, tàu khách, tàu container, tàu LNG/LPG và tàu chuyên dụng cần đo STW và SOG với độ chính xác cao, bao gồm cả tốc độ ngang (athwartship) để phục vụ điều động chính xác. Cốt lõi của công nghệ này là hiệu ứng Doppler trong môi trường nước biển, cho phép đo vận tốc tương đối giữa tàu và đáy biển hoặc khối nước xung quanh.
Đầu dò (Transducer) phát ra chùm sóng siêu âm tần số cao (thường từ 100 kHz đến 1 MHz) nghiêng một góc nhất định (thường khoảng 60°) so với phương thẳng đứng của vỏ tàu. Khi tàu chuyển động, sóng siêu âm lan truyền trong nước, phản xạ từ đáy biển hoặc các hạt lơ lửng (suspended particles, plankton, bọt khí mịn). Do chuyển động tương đối giữa nguồn phát và mục tiêu phản xạ, tần số sóng phản xạ trở về đầu dò sẽ bị dịch chuyển so với tần số phát ban đầu. Độ chênh lệch tần số này chính là tần số Doppler, được xử lý qua bộ thu – khuếch đại – lọc – chuyển đổi số, từ đó hệ thống tính ra vận tốc tàu theo phương chùm tia.
Trong thực tế, để suy ra vận tốc dọc (fore-and-aft) và vận tốc ngang (athwartship), hệ thống sử dụng nhiều chùm tia với góc phương vị khác nhau. Từ các thành phần vận tốc dọc theo từng chùm, bộ xử lý thực hiện phép chiếu vector và giải hệ phương trình để tách riêng các thành phần vận tốc theo trục dọc và ngang của tàu. Điều này cho phép hiển thị đồng thời tốc độ tiến/lùi và tốc độ trôi ngang, rất hữu ích khi cập cầu, neo đậu, đi trong luồng hẹp hoặc điều động DP (Dynamic Positioning).
Để đảm bảo đo tốc độ Speed Log ổn định trong điều kiện tàu lắc dọc (pitching), Doppler Speed Log sử dụng cấu hình Janus Configuration – tức là bố trí hai (hoặc bốn) chùm tia đối xứng hướng về mũi và lái, thường nằm trong cùng một mặt phẳng dọc tàu. Khi tàu chúi mũi hoặc nhồi sóng, góc tới của chùm phía trước và phía sau thay đổi theo hướng ngược nhau, dẫn đến sai số Doppler có xu hướng bù trừ. Bằng cách lấy trung bình hoặc kết hợp có trọng số giữa các chùm, hệ thống giảm đáng kể ảnh hưởng của chuyển động lắc dọc, duy trì được độ chính xác cao ngay cả trong điều kiện biển động cấp 5–6.
Doppler Speed Log thường có hai chế độ làm việc chính, được chuyển đổi tự động hoặc bằng tay tùy cấu hình hệ thống:
Bottom Track (SOG): sóng siêu âm phản xạ từ đáy biển, cho phép đo tốc độ so với đất (Speed Over Ground) rất chính xác trong vùng nước có độ sâu phù hợp. Giới hạn độ sâu hiệu quả phụ thuộc tần số làm việc, công suất phát, độ hấp thụ âm của nước và đặc tính phản xạ của đáy, nhưng trên thực tế thường hiệu quả đến khoảng 200 m, một số hệ thống chuyên dụng có thể lớn hơn. Chế độ này đặc biệt quan trọng cho điều động, cập cầu, đi trong vùng nước nông, kênh đào, nơi sai số do dòng chảy ảnh hưởng lớn nếu chỉ dựa vào STW.
Water Track (STW): khi độ sâu quá lớn, tín hiệu phản xạ từ đáy biển suy giảm mạnh, hệ thống chuyển sang đo phản xạ từ các lớp hạt lơ lửng, sinh vật phù du, bọt khí mịn ở độ sâu khoảng 10–30 m dưới lườn tàu, từ đó tính ra tốc độ qua nước (Speed Through Water). Chế độ này đặc biệt hữu ích trên các tuyến hàng hải đại dương, nơi độ sâu vượt xa khả năng Bottom Track. Dữ liệu STW là cơ sở để tính slip, tối ưu chân vịt, đánh giá hiệu suất thân tàu và tiêu hao nhiên liệu.
Trong bài toán đo tốc độ Speed Log, Doppler Speed Log có các ưu điểm nổi bật:
Độ chính xác rất cao, đặc biệt ở tốc độ thấp (vài chục cm/s), đáp ứng yêu cầu SOLAS/IMO cho tàu khách và tàu lớn. Sai số thường ở mức <1% hoặc tốt hơn trong dải tốc độ làm việc.
Đo được cả tốc độ dọc và tốc độ ngang, hỗ trợ điều động cập/rời cầu an toàn, giảm nguy cơ va chạm, cọ xát cầu bến, đặc biệt khi kết hợp với bow thruster, stern thruster và hệ thống joystick control.
Khả năng cung cấp đồng thời STW và SOG cho nhiều hệ thống khác nhau qua các giao thức chuẩn như NMEA 0183, NMEA 2000, IEC 61162, analog output, xung (pulse). Điều này cho phép tích hợp sâu với ECDIS, radar ARPA, autopilot, VDR, noon report và hệ thống tối ưu hành trình.
Nhược điểm chính là nhạy cảm với bọt khí (aeration) và yêu cầu lắp đặt cơ khí, vị trí đầu dò rất chặt chẽ. Nếu đầu dò đặt quá gần vùng nhiễu loạn dòng chảy (gần bow thruster, sea chest, strake, bilge keel) hoặc khu vực dễ sinh bọt khí khi tàu chạy tốc độ cao, chất lượng đo tốc độ Speed Log sẽ suy giảm đáng kể, xuất hiện mất tín hiệu, nhảy số hoặc sai số lớn. Ngoài ra, việc khoan lỗ xuyên vỏ tàu, lắp ống ống chèn (sea valve, sea chest) và căn chỉnh góc lắp đặt đòi hỏi quy trình kỹ thuật nghiêm ngặt, thường thực hiện trong đợt lên đà. Chi phí đầu tư ban đầu và chi phí hiệu chuẩn (calibration, sea trial) cũng cao hơn so với EM Log.
Máy đo tốc độ điện từ – Electromagnetic Log (EM Log)
EM Log là lựa chọn phổ biến cho nhiệm vụ đo STW trên tàu thương mại nhờ thiết kế đơn giản, không có bộ phận chuyển động và chi phí bảo trì thấp. Nguyên lý hoạt động dựa trên định luật cảm ứng điện từ Faraday, mô tả suất điện động cảm ứng sinh ra khi một dây dẫn chuyển động trong từ trường.
Một cuộn dây điện từ trong đầu dò tạo ra từ trường ổn định xung quanh vùng đo. Nước biển, với độ dẫn điện nhất định, đóng vai trò như một “dây dẫn” chuyển động. Khi tàu chuyển động tương đối so với nước, khối nước biển cắt ngang các đường sức từ, tạo ra một suất điện động cảm ứng giữa các điện cực bố trí trên đầu dò. Giá trị điện áp cảm ứng này tỷ lệ với vận tốc tương đối giữa nước và đầu dò, tức là vận tốc tàu qua nước. Hệ thống khuếch đại, lọc nhiễu, chuyển đổi A/D và tuyến tính hóa tín hiệu để hiển thị thành tốc độ qua nước.
Để đảm bảo độ ổn định, đầu dò EM thường được thiết kế sao cho:
Hướng trục đo trùng với trục dọc tàu, giảm sai số do thành phần vận tốc ngang.
Bề mặt tiếp xúc nước được làm nhẵn, chống bám hà (anti-fouling) nhằm hạn chế ảnh hưởng của lớp sinh vật biển làm biến dạng trường dòng chảy.
Đường dây tín hiệu được che chắn (shielding) tốt để giảm nhiễu điện từ từ động cơ, máy phát, biến tần.
Trong bài toán đo tốc độ Speed Log, EM Log có các ưu điểm:
Độ chính xác tốt ở dải tốc độ thấp và trung bình, đáp ứng yêu cầu cho phần lớn tàu hàng, tàu dầu, tàu bulk carrier, tàu dịch vụ. Sai số thường ổn định nếu được hiệu chuẩn đúng trong quá trình sea trial.
Cấu trúc cơ khí đơn giản, không có bộ phận quay, ít hỏng vặt, phù hợp làm thiết bị STW độc lập dự phòng cho Doppler Log hoặc làm thiết bị chính trên tàu không yêu cầu đo SOG bằng acoustic.
Kích thước đầu dò nhỏ gọn, dễ bố trí trên nhiều loại tàu, có thể lắp qua ống xuyên vỏ với cơ cấu rút lên (retractable) để bảo trì, vệ sinh khi tàu đang nổi.
Tuy nhiên, vì dựa trên tính dẫn điện của nước biển, EM Log có thể bị ảnh hưởng bởi nhiệt độ và độ mặn. Độ dẫn điện của nước biển thay đổi theo nhiệt độ và độ mặn, làm thay đổi hệ số tỷ lệ giữa vận tốc và điện áp cảm ứng. Do đó, các hệ thống hiện đại thường tích hợp cảm biến nhiệt (Thermistor) để đo nhiệt độ nước và áp dụng thuật toán bù trừ tự động trong bộ xử lý. Một số hệ thống còn cho phép hiệu chỉnh thủ công hệ số K-factor trong quá trình sea trial để phù hợp với điều kiện khai thác thực tế.
Khi cảm biến nhiệt hoặc mạch bù trừ hỏng, dữ liệu đo tốc độ Speed Log có thể bị sai lệch đáng kể, đặc biệt khi tàu di chuyển qua các vùng nước có nhiệt độ, độ mặn thay đổi lớn (ví dụ: cửa sông, vùng băng tan, vùng nước lạnh sâu). Tình trạng này thường được báo hiệu bằng trạng thái nhấp nháy, cảnh báo lỗi sensor hoặc alarm “speed log failure” trên màn hình hiển thị và truyền qua mạng dữ liệu đến các hệ thống khác. Ngoài ra, EM Log không đo được SOG, nên trong nhiều cấu hình, nó được sử dụng kết hợp với GPS để cung cấp đầy đủ cả STW và SOG cho hệ thống điều khiển.
Máy đo tốc độ áp suất – Pitometer Log / Pitot Tube
Pitometer Log là công nghệ dựa trên định luật Bernoulli, đo độ chênh áp suất giữa dòng nước chảy trực tiếp vào ống (áp suất toàn phần – total pressure) và áp suất tĩnh của nước xung quanh (static pressure). Từ độ chênh áp này, hệ thống suy ra vận tốc tàu theo công thức:
v = √(2ΔP / ρ)
trong đó v là vận tốc, ΔP là độ chênh áp suất đo được, ρ là khối lượng riêng của nước biển. Về mặt lý thuyết, áp suất động tỷ lệ với bình phương vận tốc, do đó ở tốc độ thấp, tín hiệu áp suất động rất nhỏ và dễ bị nhiễu bởi dao động áp suất, rung động thân tàu, sóng, và sai số của cảm biến áp suất. Đây là lý do Pitometer Log ít được sử dụng trên tàu thương mại hiện đại, nơi yêu cầu độ chính xác tốt ở dải tốc độ thấp phục vụ điều động.
Cấu hình điển hình của Pitometer Log bao gồm:
Ống Pitot hoặc cụm ống đa lỗ (multi-hole probe) nhô ra khỏi vỏ tàu, hướng về phía mũi để hứng dòng chảy trực tiếp.
Đường ống dẫn áp suất toàn phần và áp suất tĩnh về bộ cảm biến áp suất vi sai (differential pressure transducer).
Bộ xử lý chuyển đổi ΔP sang vận tốc, áp dụng hiệu chỉnh theo mật độ nước, nhiệt độ, độ sâu nếu cần.
Trong bối cảnh đo tốc độ Speed Log chuẩn SOLAS và IMO, Pitometer Log thường không phải là lựa chọn ưu tiên do:
Hạn chế về độ chính xác ở dải tốc độ thấp, trong khi đây là vùng tốc độ quan trọng cho cập cầu, neo đậu, đi trong luồng hẹp.
Độ nhạy cao với thay đổi mật độ nước (nhiệt độ, độ mặn), đòi hỏi hiệu chỉnh thường xuyên nếu muốn duy trì độ chính xác.
Yêu cầu bảo trì cơ khí phức tạp hơn so với EM Log hoặc Doppler Log: ống Pitot dễ bị bám hà, tắc nghẽn bởi sinh vật biển, cặn bẩn; cần vệ sinh định kỳ, đôi khi phải rút ống hoặc lên đà.
Mặc dù vậy, Pitometer Log vẫn có thể gặp trên một số tàu quân sự, tàu cao tốc hoặc tàu chuyên dụng, nơi ưu tiên phản ứng nhanh của tín hiệu áp suất ở dải tốc độ trung bình – cao và có hệ thống bảo trì, hiệu chuẩn chuyên sâu. Trong các ứng dụng này, Pitometer Log thường được kết hợp với các cảm biến khác (GPS, Doppler, inertial sensors) trong một hệ thống fusion để bù trừ nhược điểm từng công nghệ và nâng cao độ tin cậy tổng thể của dữ liệu tốc độ.
Hướng dẫn lắp đặt máy đo tốc độ tàu biển Speed Log và tối ưu vị trí đầu dò
Chất lượng đo tốc độ Speed Log phụ thuộc rất lớn vào vị trí và phương án lắp đặt đầu dò (Transducer).

Một hệ thống Doppler hoặc EM Log dù hiện đại đến đâu nhưng lắp sai vị trí vẫn có thể cho kết quả sai, trôi dạt tốc độ, hoặc mất tín hiệu liên tục khi tàu chạy trong các điều kiện sóng gió khác nhau.
Về nguyên tắc thủy động lực học, vị trí lắp đặt lý tưởng phải đảm bảo các tiêu chí sau để đầu dò làm việc trong vùng dòng chảy “sạch” và ổn định:
Dòng chảy tầng (laminar flow) ổn định, không bị xoáy, không có bọt khí, không có bong bóng khí từ mũi tàu hoặc từ các lỗ xả. Dòng chảy tầng giúp vận tốc nước tại vùng đo gần như tuyến tính, giảm nhiễu cho thuật toán xử lý Doppler hoặc cảm biến điện từ.
Cách xa các nguồn nhiễu cơ học và thủy động như chân vịt mũi (bow thruster), ống xả ballast, ống xả nước làm mát máy chính, các gờ lồi vỏ tàu, hốc thruster, bilge keel, strake, hoặc các kết cấu gia cường tạo xoáy. Các vùng này thường xuất hiện dòng chảy rối (turbulent flow), xoáy cục bộ và bọt khí làm suy giảm năng lượng sóng siêu âm và gây sai số tốc độ.
Cách xa transducer của Echo Sounder ít nhất khoảng 2.5 m theo cả phương dọc và phương ngang, để tránh nhiễu chéo tần số, hiện tượng “ringing” hoặc xung phản xạ chồng lấn. Với các hệ thống Doppler đa tần, khoảng cách này càng quan trọng để tránh trùng phổ tần số làm việc.
Trên thực tế thiết kế, các nhà thiết kế vỏ tàu và hãng thiết bị thường chọn vị trí khoảng 1/3 chiều dài tàu (LWL) tính từ mũi để lắp đầu dò Speed Log. Đây là vùng:
- Dòng chảy tương đối ổn định, ít bị ảnh hưởng bởi sóng do chân vịt chính và các cấu trúc phía sau.
- Độ cong vỏ tàu không quá lớn, thuận lợi cho việc tạo bệ phẳng hoặc ống lắp (sea chest) đảm bảo mặt đầu dò tiếp xúc nước đều.
- Khoảng cách đến mũi đủ để giảm ảnh hưởng của sóng mũi (bow wave) và bong bóng khí trượt dọc thân tàu.
Khi lựa chọn vị trí cụ thể trên bản vẽ vỏ tàu, kỹ sư cần xem xét thêm:
- Độ sâu ngập nước tối thiểu của đầu dò khi tàu ở trạng thái ballast và full load, đảm bảo đầu dò luôn nằm dưới mặt nước an toàn, tránh hiện tượng “breaking the surface”.
- Khả năng tiếp cận từ trong khoang để bảo trì, kiểm tra van, thay thế gasket, kiểm tra cáp và hộp nối (junction box).
- Khoảng cách đến các kết cấu dọc như sống chính, sống phụ, khung sườn để bố trí gia cường cơ khí cho bệ lắp.
Trong quá trình thi công, cần đặc biệt chú ý đến góc lắp đặt của đầu dò so với trục dọc tàu và mặt phẳng đáy tàu. Đối với Doppler Speed Log, sai lệch góc quá lớn sẽ làm sai toàn bộ phép tính đo tốc độ Speed Log vì hệ thống tính toán dựa trên thành phần vận tốc dọc trục tàu (longitudinal component) và đôi khi cả thành phần ngang (athwartship component).
Các yêu cầu kỹ thuật thường được hãng thiết bị và quy phạm (Class Rules) đưa ra gồm:
- Góc lệch so với trục dọc tàu < 5°, lý tưởng khoảng 1°. Góc này bao gồm cả sai lệch do thi công cơ khí và sai lệch do biến dạng vỏ tàu. Góc càng nhỏ, sai số cosin trong phép chiếu vận tốc càng thấp, giúp hệ thống đạt độ chính xác cao hơn khi hiệu chuẩn (calibration).
- Bề mặt tiếp xúc với nước phải phẳng, không bị lõm hoặc lồi gây nhiễu dòng chảy. Nếu vỏ tàu cong, cần thiết kế bệ đệm (fairing block) hoặc ống lắp có mặt đáy được gia công phẳng, song song với hướng dòng chảy cục bộ.
- Đảm bảo đầu dò không nhô quá nhiều so với bề mặt vỏ tàu để tránh tạo xoáy và tăng lực cản, nhưng cũng không bị “chìm” trong hốc sâu gây tích tụ bọt khí. Với kiểu flush mount, mép bệ và mép vỏ tàu cần được bo tròn, mài nhẵn.
Về phương án cơ khí, có hai giải pháp chính cho lắp đặt đầu dò phục vụ đo tốc độ Speed Log, mỗi giải pháp có ưu và nhược điểm riêng, cần cân nhắc theo loại tàu, chu kỳ lên ụ và giá trị hệ thống:
Lắp với Gate Valve (Van cổng): đầu dò được lắp trong một ống xuyên vỏ (sea valve) có van cổng hoặc van dao, cho phép rút đầu dò lên khi tàu đang nổi. Phương án này:
- Rất thuận tiện cho bảo trì, vệ sinh hà bám, thay thế cảm biến, kiểm tra O-ring mà không cần đưa tàu lên ụ.
- Giảm thời gian dừng tàu, đặc biệt quan trọng với tàu thương mại, tàu dịch vụ ngoài khơi, tàu du lịch.
- Chi phí đầu tư ban đầu cao hơn do cần van đạt chuẩn Class, ống lắp, bệ gia cường, và đôi khi thêm cơ cấu nâng hạ.
- Yêu cầu thi công chính xác: bề mặt bích van phải vuông góc với trục ống, trục ống phải thẳng hàng với hướng thiết kế của đầu dò để không tạo sai lệch góc.
- Cần kiểm tra kỹ seat của van, độ kín nước khi rút đầu dò, và khả năng thao tác an toàn trong khoang chật hẹp.
Phương án này đặc biệt phù hợp với các hệ thống Doppler giá trị cao, tàu hoạt động liên tục, hoặc tàu khó sắp xếp lịch lên ụ định kỳ.
Lắp dạng Tank / Flush Mount: đầu dò được lắp cố định trong khoang hoặc bệ hàn chết, thường là một “tank” nhỏ hoặc sea chest. Đặc điểm:
- Chi phí ban đầu thấp hơn, cấu trúc đơn giản, ít chi tiết chuyển động.
- Độ cứng vững cơ khí cao, ít nguy cơ rò rỉ tại vị trí van, phù hợp với tàu nhỏ hoặc tàu có yêu cầu đơn giản.
- Việc bảo dưỡng, thay thế rất tốn kém vì thường phải chờ tàu lên ụ hoặc thuê thợ lặn chuyên nghiệp để tháo lắp từ bên ngoài.
- Cần thiết kế tank sao cho không tích tụ bọt khí, cặn bẩn; đáy tank phải phẳng, không có gờ gây xoáy, và lỗ thông nước đủ lớn để đảm bảo trao đổi nước liên tục.
Phương án này chỉ nên áp dụng khi chủ tàu chấp nhận kế hoạch bảo trì dài hạn phù hợp, có lịch lên ụ định kỳ rõ ràng và hệ thống Speed Log không phải là thiết bị “critical” cho mọi hành trình.
Trong mọi trường hợp, trước khi nghiệm thu hệ thống máy đo tốc độ tàu biển Speed Log, cần kiểm tra kỹ và ghi nhận bằng biên bản, kèm hình ảnh, các hạng mục sau:
- Độ kín nước của van, bệ lắp, mối hàn, mặt bích và các mối nối ống. Thử kín có thể thực hiện bằng thử áp lực (hydrostatic test) hoặc quan sát rò rỉ khi tàu hạ thủy, kết hợp kiểm tra độ ẩm trong khoang.
- Độ thẳng hàng và góc nghiêng của đầu dò so với trục tàu và mặt phẳng đáy. Nên sử dụng thước thủy, máy thủy bình, hoặc thiết bị đo laser để xác nhận góc lắp đặt thực tế so với giá trị thiết kế, sau đó cập nhật vào hồ sơ hiệu chuẩn.
- Khoảng cách an toàn đến các thiết bị siêu âm khác (Echo Sounder, Sonar). Cần đối chiếu bản vẽ bố trí thiết bị dưới đáy tàu, đảm bảo không có trường hợp hai transducer làm việc ở tần số gần nhau và hướng phát chùm tia giao nhau trong nước.
- Chất lượng đi dây cáp từ đầu dò về bộ xử lý: cáp phải được cố định chắc chắn, tránh chạy song song quá gần với cáp nguồn công suất lớn để giảm nhiễu điện từ, các mối nối phải dùng hộp nối kín nước đạt chuẩn IP phù hợp.
- Kiểm tra nhãn mác, số seri đầu dò, đối chiếu với tài liệu hãng để đảm bảo đúng model, đúng dải tần số, đúng góc phát chùm tia theo thiết kế.
Một lỗi nhỏ trong giai đoạn lắp đặt, như sai lệch vài độ trong góc lắp, bề mặt đáy không phẳng, hoặc đặt quá gần Echo Sounder, có thể khiến toàn bộ quá trình đo tốc độ Speed Log bị nhiễu, gây mất tín hiệu hoặc sai số khó hiệu chuẩn. Trong nhiều trường hợp, sai số này chỉ bộc lộ rõ khi tàu chạy ở dải tốc độ cao hoặc trong điều kiện sóng chéo, khiến việc chẩn đoán nguyên nhân trở nên phức tạp và tốn kém.
Do đó, việc phối hợp chặt chẽ giữa nhà máy đóng tàu, hãng thiết bị và kỹ sư Nav & Comm là điều bắt buộc ngay từ giai đoạn thiết kế bố trí (layout), duyệt bản vẽ với Đăng kiểm, cho đến thi công, kiểm tra tại bến và chạy thử trên biển (sea trial). Các thông số lắp đặt thực tế cần được ghi lại chi tiết để phục vụ cho quá trình hiệu chuẩn, bảo trì và phân tích sự cố sau này.
Tích hợp dữ liệu đo tốc độ Speed Log với hệ thống NMEA 0183 và thiết bị hàng hải
Trong kiến trúc hệ thống hàng hải hiện đại, Speed Log không chỉ là một cảm biến đo tốc độ đơn lẻ mà đóng vai trò như một nguồn dữ liệu tốc độ trung tâm trong toàn bộ mạng Nav & Comm. Dữ liệu từ quá trình đo tốc độ Speed Log được xử lý nội bộ (filtering, linearization, compensation) rồi truyền ra ngoài qua chuẩn IEC 61162-1 (NMEA 0183) đến nhiều thiết bị khác nhau, tạo thành một mạng lưới thông tin thống nhất trên tàu. Trong nhiều thiết kế, Speed Log còn là một “hub” tốc độ, kết hợp STW với dữ liệu SOG/COG từ GPS để cung cấp bức tranh động học đầy đủ cho các hệ thống điều hướng.
Các thiết bị thường nhận dữ liệu từ máy đo tốc độ tàu biển Speed Log bao gồm, nhưng không giới hạn ở:
Radar/ARPA: sử dụng Speed Through Water (STW) để tính toán vector chuyển động tương đối giữa tàu mình và mục tiêu. STW được dùng trong thuật toán ARPA để xác định CPA/TCPA, phân tách chuyển động do dòng chảy và gió, từ đó nâng cao độ chính xác của dự đoán quỹ đạo mục tiêu và hỗ trợ tránh va. Một số radar còn cho phép lựa chọn ưu tiên STW hoặc SOG tùy theo chế độ vận hành (coastal, open sea, pilotage).
ECDIS: kết hợp Speed Over Ground (SOG), Course Over Ground (COG), vị trí GPS và STW để hiển thị chính xác đường đi trên hải đồ điện tử. STW giúp ECDIS tính toán trôi dạt (set & drift) bằng cách so sánh STW với SOG, từ đó hỗ trợ chức năng route monitoring, ETA prediction và tối ưu tuyến hành trình. Một số ECDIS cho phép hiển thị đồng thời vector SOG và vector STW để sĩ quan boong đánh giá ảnh hưởng của dòng chảy.
AIS: phát quảng bá tốc độ tàu cho các tàu khác và trạm bờ. Thông thường AIS sử dụng SOG từ GPS, nhưng trong một số cấu hình, dữ liệu STW từ Speed Log được đưa vào AIS như một nguồn tham chiếu hoặc dự phòng. Việc đồng bộ giữa STW và SOG giúp phát hiện sai lệch GPS, hỗ trợ an toàn hàng hải trong khu vực tín hiệu GNSS kém ổn định.
VDR: ghi lại toàn bộ lịch sử tốc độ, quãng đường và các tham số liên quan phục vụ điều tra tai nạn và phân tích vận hành. VDR thường lưu cả các câu lệnh NMEA từ Speed Log (VBW, VLW, VHW) lẫn các tín hiệu xung quãng đường nếu có. Dữ liệu này cho phép tái dựng chi tiết trạng thái chuyển động của tàu tại mọi thời điểm, bao gồm thay đổi tốc độ, thao tác điều động, và tương quan với dữ liệu radar, ECDIS, VHF.
Autopilot: sử dụng dữ liệu tốc độ để tối ưu điều khiển hướng và quỹ đạo. Ở tốc độ thấp, autopilot có thể áp dụng thuật toán điều khiển khác so với khi tàu chạy hành trình, do đó thông tin STW chính xác là rất quan trọng. Một số autopilot còn dùng STW để tính toán rate of turn tối ưu, giảm dao động hướng (yawing) và tiết kiệm nhiên liệu.
Trong chuẩn NMEA 0183, một số câu lệnh (sentences) quan trọng liên quan đến đo tốc độ Speed Log là, mỗi câu lệnh có cấu trúc trường dữ liệu, đơn vị và ý nghĩa kỹ thuật riêng mà kỹ sư cần nắm rõ:
$--VBW (Dual Ground/Water Speed): chứa tốc độ dọc/ngang so với nước và so với đất, kèm trạng thái tín hiệu. Đây là câu lệnh cốt lõi cho Radar/ARPA và ECDIS khi cần cả STW và SOG trong cùng một khung dữ liệu. Một bản tin VBW điển hình bao gồm:
- Tốc độ dọc qua nước (longitudinal water speed)
- Tốc độ ngang qua nước (transverse water speed)
- Tốc độ dọc qua đất (longitudinal ground speed)
- Tốc độ ngang qua đất (transverse ground speed)
- Các cờ trạng thái (A/V) cho biết dữ liệu hợp lệ hay không
Radar/ARPA thường yêu cầu trường tốc độ dọc qua nước chính xác để tính toán vector chuyển động tàu mình, trong khi ECDIS có thể sử dụng cả thành phần dọc và ngang để đánh giá trôi dạt.
$--VLW (Distance Traveled through Water): cung cấp tổng quãng đường (total distance) và quãng đường Trip, thường dùng cho tính toán nhiên liệu, báo cáo hành trình và phân tích hiệu suất khai thác. Các hệ thống quản lý năng lượng (SEEMP, noon report) có thể lấy dữ liệu VLW để tính fuel per NM, fuel per voyage và so sánh với kế hoạch. Việc reset giá trị Trip thường được thực hiện từ Speed Log hoặc từ một HMI chuyên dụng, và cần được kiểm soát để tránh sai lệch dữ liệu báo cáo.
$--VHW (Water Speed & Heading): cung cấp tốc độ qua nước và hướng mũi tàu, thường được các hệ thống điều động và autopilot sử dụng. Câu lệnh này kết hợp dữ liệu từ Speed Log (STW) và Gyrocompass (heading), đôi khi được tạo bởi một thiết bị trung gian (data combiner). VHW rất hữu ích cho các hệ thống điều khiển tự động cần biết tương quan giữa hướng mũi và tốc độ thực tế để điều chỉnh góc lái.
$--VTG (Course Over Ground & Ground Speed): thường do GPS xuất ra, nhưng trong nhiều cấu hình, dữ liệu này được đưa vào Speed Log để tham chiếu hoặc hiển thị kết hợp. Một số Speed Log có chức năng hiển thị đồng thời STW và SOG trên cùng màn hình, cho phép sĩ quan boong đánh giá ngay mức độ trôi dạt. Ngoài ra, Speed Log có thể sử dụng VTG để tự động hiệu chỉnh (auto-calibration) trong một số chế độ đặc biệt.
Khi thiết kế hệ thống, kỹ sư cần đảm bảo một số khía cạnh kỹ thuật quan trọng để chuỗi dữ liệu từ đo tốc độ Speed Log đến các thiết bị đích hoạt động ổn định, tin cậy và phù hợp với chuẩn:
Tốc độ baud phù hợp (thường 4800 hoặc 38400 bps) cho từng cổng NMEA. Chuẩn NMEA 0183 cổ điển sử dụng 4800 bps, nhưng nhiều thiết bị đời mới hỗ trợ 38400 bps (NMEA 0183-HS) để truyền dữ liệu dày hơn. Kỹ sư cần:
- Đồng bộ baud rate giữa Speed Log và thiết bị nhận (Radar, ECDIS, AIS, VDR…)
- Kiểm tra khả năng xử lý của thiết bị khi trên cùng một cổng có nhiều câu lệnh với tần số cao
- Tránh cấu hình baud rate cao không cần thiết trên cáp dài, dễ gây suy hao và nhiễu
Số lượng cổng xuất/nhập đủ để cấp dữ liệu đo tốc độ Speed Log cho tất cả thiết bị cần thiết. Trong thực tế, một Speed Log có thể chỉ có 2–4 cổng NMEA output, trong khi số thiết bị cần STW có thể lớn hơn. Khi đó, kỹ sư phải:
- Sử dụng NMEA buffer / NMEA expander để nhân bản tín hiệu mà vẫn đảm bảo cách ly điện
- Thiết kế sơ đồ phân phối sao cho hỏng một buffer không làm mất dữ liệu cho toàn bộ hệ thống
- Ưu tiên cấp dữ liệu trực tiếp (không qua nhiều tầng trung gian) cho các thiết bị quan trọng như Radar/ARPA, ECDIS, VDR
Định dạng câu lệnh tương thích với yêu cầu của từng thiết bị (một số Radar/ARPA đời cũ yêu cầu định dạng rất cụ thể). Ngoài việc đúng loại câu lệnh (VBW, VHW, VLW), cần chú ý:
- Số chữ số thập phân, đơn vị (knots, km/h) và vị trí dấu phẩy
- Tiền tố talker ID (VD:
VDVBW,SDVBW) có thể bị giới hạn trên thiết bị cũ - Tần số phát (update rate) – ví dụ Radar yêu cầu 1–2 Hz, trong khi VDR chỉ cần 1 Hz
- Checksum và ký tự kết thúc câu lệnh phải tuân thủ chặt chẽ chuẩn IEC 61162-1
Ngoài dữ liệu số, nhiều hệ thống VDR, Radar hoặc thiết bị đời cũ còn yêu cầu tín hiệu xung/relay từ Speed Log, đặc biệt trong các retrofit hoặc khi tích hợp với thiết bị analog cũ:
1 xung / 0.005 NM hoặc 200 xung / NM để đếm quãng đường. Tín hiệu này thường ở dạng open collector hoặc TTL/OC, đôi khi là dạng relay cơ. Các hệ thống đếm quãng đường cơ khí hoặc điện tử cũ sẽ dựa vào số xung để tính distance run. Kỹ sư cần kiểm tra:
- Mức điện áp và dòng tối đa của đầu vào thiết bị nhận xung
- Độ dài cáp và suy hao tín hiệu, có cần bộ lặp (repeater) hay không
- Khả năng chống nhiễu (shielding, grounding) để tránh đếm sai xung
Tín hiệu tiếp điểm khô (dry contact) để báo trạng thái hoạt động, ví dụ Speed Log failure, Speed Log active, hoặc chuyển đổi giữa cảm biến mũi/lái (bow/stern sensor). Các tiếp điểm này thường được đưa về hệ thống AMS/IAS hoặc VDR để ghi nhận trạng thái. Việc phân cực, bảo vệ quá áp và cách ly galvanic cần được thiết kế cẩn thận để tránh gây nhiễu ngược lên Speed Log.
Việc kiểm tra, mô phỏng và xác nhận toàn bộ chuỗi đo tốc độ Speed Log → xử lý → xuất NMEA → nhận tại thiết bị đích là một phần quan trọng trong quá trình nghiệm thu hệ thống Nav & Comm. Các công ty dịch vụ chuyên nghiệp thường sử dụng thiết bị giả lập NMEA để kiểm tra độc lập từng mắt xích, tránh nhầm lẫn giữa lỗi thiết bị và lỗi đấu nối. Quy trình kiểm tra chuyên sâu thường bao gồm:
- Giả lập các giá trị STW khác nhau (0 kn, tốc độ thấp, tốc độ hành trình, tốc độ tối đa) và quan sát phản ứng của Radar, ECDIS, Autopilot, VDR
- Kiểm tra tính nhất quán giữa VBW, VHW, VLW và dữ liệu GPS (VTG) để phát hiện sai lệch cấu hình hoặc lỗi hiệu chuẩn
- Đo và ghi lại dạng sóng tín hiệu xung quãng đường bằng oscilloscope hoặc logger chuyên dụng để đánh giá độ ổn định và nhiễu
- Thử nghiệm kịch bản mất tín hiệu (mất STW, mất SOG) và xác minh cách các thiết bị đích xử lý tình huống (báo động, chuyển nguồn dự phòng, giữ giá trị cuối…)
- Đánh giá tải đường truyền NMEA (số câu lệnh/giây, dung lượng băng thông) để đảm bảo không vượt quá khả năng của cổng serial và thiết bị nhận
Trong các dự án nâng cấp (retrofit), việc tích hợp máy đo tốc độ tàu biển Speed Log mới với hệ thống NMEA 0183 và thiết bị hàng hải hiện hữu đòi hỏi kỹ sư phải hiểu sâu cả chuẩn giao tiếp lẫn đặc thù từng hãng thiết bị. Sự khác biệt nhỏ trong định dạng câu lệnh, mức tín hiệu, hay cách xử lý lỗi có thể dẫn đến các hiện tượng khó chẩn đoán như mất vector trên radar, sai lệch track trên ECDIS, hoặc dữ liệu VDR không đầy đủ. Do đó, một thiết kế tốt luôn đi kèm với tài liệu cấu hình chi tiết, sơ đồ kết nối rõ ràng và kế hoạch thử nghiệm có hệ thống cho toàn bộ chuỗi dữ liệu từ cảm biến đến thiết bị hiển thị và ghi log.
Hiệu chuẩn, kiểm tra và xử lý sự cố trong đo tốc độ Speed Log
Không có hệ thống máy đo tốc độ tàu biển Speed Log nào lắp xong là chính xác tuyệt đối. Độ chính xác phụ thuộc vào vị trí lắp đặt đầu dò, điều kiện thủy động lực học thân tàu, cấu hình tham số trong bộ xử lý và cả điều kiện môi trường thực tế. Để đảm bảo dữ liệu đo tốc độ Speed Log đáp ứng yêu cầu SOLAS/IMO, tiêu chuẩn IEC/ISO liên quan và phù hợp với thực tế vận hành, cần tiến hành hiệu chuẩn (calibration), kiểm tra định kỳ và chẩn đoán chuyên sâu khi có dấu hiệu bất thường.
Hiệu chuẩn dặm đo – Measured Mile Calibration
Phương pháp chuẩn nhất để hiệu chuẩn đo tốc độ Speed Log là chạy dặm đo (Measured Mile) trong quá trình chạy thử đường dài (Sea Trial). Đây là phương pháp được đăng kiểm và nhà máy đóng tàu chấp nhận rộng rãi, dùng để xác lập hệ số hiệu chỉnh ban đầu cho hệ thống. Quy trình cơ bản có thể được triển khai chi tiết như sau:
Lựa chọn tuyến dặm đo
- Chọn đoạn biển có hai mốc chuẩn trên bờ (beacons, tháp, cột mốc) với khoảng cách đã được đo chính xác bằng phương pháp trắc địa hoặc GNSS vi sai.
- Đảm bảo khu vực có độ sâu nước đủ lớn, đáy biển tương đối bằng phẳng, hạn chế ảnh hưởng của sóng phản xạ và nhiễu đáy (đặc biệt quan trọng với Doppler Speed Log).
- Ưu tiên vùng có dòng chảy ổn định, ít biến thiên theo thời gian và theo chiều ngang, để việc triệt tiêu ảnh hưởng dòng chảy bằng phương pháp hai chiều đạt hiệu quả cao.
Chuẩn bị trước khi chạy dặm đo
- Kiểm tra cấu hình ban đầu của Speed Log: loại cảm biến (ultrasonic, Doppler, electromagnetic), số lượng trục đo (single-axis, dual-axis, three-axis), đơn vị hiển thị (knots, km/h), hệ số Speed Offset đang sử dụng.
- Đảm bảo RPM máy chính ổn định, hệ thống lái hoạt động bình thường, không có thao tác thay đổi tải đột ngột trong suốt quá trình chạy dặm đo.
- Đồng bộ thời gian giữa nhật ký máy, nhật ký boong, hệ thống ghi dữ liệu (data logger) và đồng hồ dùng để đo thời gian qua mốc.
Chạy dặm đo theo một hướng
- Cho tàu chạy ổn định theo một hướng, giữ RPM cố định trong một khoảng thời gian đủ dài trước khi vào đoạn dặm đo để đạt trạng thái thủy động lực học ổn định.
- Ghi lại thời điểm tàu đi qua mốc thứ nhất và mốc thứ hai bằng đồng hồ có độ phân giải tối thiểu 0,1 s.
- Tính SOG1 (Speed Over Ground) theo công thức: SOG1 = L / t1, trong đó L là chiều dài dặm đo, t1 là thời gian đi qua hai mốc.
- Đồng thời ghi lại tốc độ hiển thị trên Speed Log (Speed Through Water – STW) tại đoạn giữa dặm đo để giảm ảnh hưởng của thao tác lái.
Chạy dặm đo theo hướng ngược lại
- Quay đầu 180°, chạy ngược lại cùng đoạn đường, giữ nguyên RPM và điều kiện tải càng giống lần chạy thứ nhất càng tốt.
- Ghi thời gian đi qua hai mốc để tính SOG2 theo cùng phương pháp.
- Đảm bảo điều kiện gió, sóng không thay đổi quá lớn giữa hai lần chạy; nếu chênh lệch, nên thực hiện thêm cặp lượt chạy thứ hai để lấy giá trị trung bình.
Tính toán tốc độ qua nước thực tế Sw
- Tính tốc độ qua nước thực tế Sw bằng cách lấy trung bình SOG1 và SOG2: Sw ≈ (SOG1 + SOG2) / 2, từ đó triệt tiêu phần lớn ảnh hưởng của dòng chảy dọc tuyến.
- Trong trường hợp có dữ liệu dòng chảy từ ADCP hoặc mô hình thủy động, có thể hiệu chỉnh thêm để tách riêng thành phần dòng chảy ngang, giúp Sw phản ánh chính xác hơn tốc độ tương đối giữa tàu và khối nước xung quanh.
So sánh với tốc độ hiển thị trên Speed Log
- Ghi lại giá trị STW hiển thị trên Speed Log tại cùng thời điểm tham chiếu, tốt nhất là dùng chức năng ghi log nội bộ hoặc hệ thống VDR để tránh sai số đọc tay.
- Tính phần trăm sai số: Error% = (STW – Sw) / Sw × 100%.
- Trong một số hệ thống, có thể cần lập bảng sai số theo nhiều mức tốc độ (ví dụ 6 kn, 10 kn, 14 kn) để đánh giá tuyến tính của hệ thống đo.
Nhập hệ số hiệu chỉnh – Speed Offset
- Dựa trên sai số trung bình trong dải tốc độ khai thác chính, nhập giá trị Speed Offset trong menu hệ thống (thường là ±% hoặc ±knots).
- Sau khi hiệu chỉnh, lặp lại một lượt chạy kiểm tra để xác nhận sai số còn lại nằm trong giới hạn cho phép của nhà sản xuất và yêu cầu đăng kiểm.
- Ghi rõ phiên bản phần mềm, cấu hình tham số, ngày giờ hiệu chuẩn trong biên bản để phục vụ truy vết sau này.
Quy trình này cần được thực hiện bởi kỹ sư Nav & Comm có kinh nghiệm, phối hợp chặt chẽ với thuyền trưởng, máy trưởng và đại diện đăng kiểm. Biên bản hiệu chuẩn là một phần quan trọng trong hồ sơ bàn giao tàu và hồ sơ kỹ thuật của hệ thống đo tốc độ Speed Log, thường được đính kèm cùng với chứng chỉ thử nghiệm Sea Trial, bản vẽ lắp đặt đầu dò và sơ đồ đấu nối.
Chẩn đoán và xử lý sự cố đo tốc độ Speed Log
Trong quá trình khai thác, các lỗi thường gặp liên quan đến đo tốc độ Speed Log không chỉ gây sai lệch thông tin điều động mà còn ảnh hưởng đến các hệ thống phụ thuộc như ECDIS, autopilot, VDR, hệ thống tối ưu nhiên liệu. Việc chẩn đoán cần dựa trên hiểu biết về nguyên lý đo (Doppler, ultrasonic, electromagnetic) và cấu trúc hệ thống (transducer – junction box – processor – repeater – interface NMEA/analog). Một số nhóm lỗi điển hình:
Mất tín hiệu / No Speed / No Data
- Triệu chứng: màn hình hiển thị 0.0 kn, báo lỗi “NO DATA”, “TX FAIL”, hoặc các thiết bị nhận NMEA báo mất câu VTG/VHW.
- Nguyên nhân thường gặp:
- Đứt cáp, lỏng đầu nối, oxy hóa chân terminal trong hộp đấu nối do ẩm mốc hoặc nước xâm nhập.
- Hỏng nguồn cấp cho bộ phát/thu siêu âm, cháy cầu chì, lỗi bộ nguồn switching trong bộ xử lý.
- Bọt khí che phủ đầu dò khi biển động mạnh, đặc biệt khi tàu chạy tốc độ cao hoặc trim mũi lớn.
- Đầu dò bị hà bám dày, sơn phủ sai quy cách làm suy giảm mạnh năng lượng siêu âm.
Tốc độ nhảy số, không ổn định
- Triệu chứng: giá trị tốc độ dao động liên tục, nhảy từ 0 lên vài knots rồi về 0, hoặc dao động ±1–2 kn quanh giá trị trung bình.
- Nguyên nhân có thể:
- Nhiễu bọt khí do chân vịt tạo xoáy, vị trí đầu dò quá gần vùng nhiễu thủy động hoặc gần sea chest.
- Hỏng cảm biến nhiệt tích hợp, dẫn đến thuật toán bù trừ tốc độ âm trong nước hoạt động sai.
- Sai số do tàu chúi mũi (trim) quá lớn, làm thay đổi góc tới của chùm sóng Doppler so với thiết kế.
- Lỗi thuật toán bù trừ pitch/roll hoặc cảm biến gia tốc/gyro tham chiếu cung cấp dữ liệu không chính xác.
Tốc độ lệch hằng định so với GPS
- Triệu chứng: STW luôn lớn hơn hoặc nhỏ hơn SOG một giá trị gần như cố định trong điều kiện biển lặng, dòng chảy yếu.
- Nguyên nhân:
- Chưa hiệu chuẩn hoặc hiệu chuẩn dặm đo không chính xác, nhập sai Speed Offset.
- Đầu dò lắp lệch so với trục dọc tàu, gây sai số hình học trong tính toán thành phần vận tốc.
- Thay đổi cấu hình thân tàu (lắp thêm bulbous bow, thay đổi sơn chống hà) nhưng không hiệu chuẩn lại.
Rò rỉ nước tại van/đầu dò
- Triệu chứng: nước rỉ vào khoang lắp đặt, ẩm ướt quanh Gate Valve, có dấu vết ăn mòn hoặc muối kết tinh.
- Nguyên nhân:
- Lắp đặt Gate Valve sai kỹ thuật, không đảm bảo độ phẳng và độ đồng trục giữa thân van và ống lót thân tàu.
- Gioăng hỏng, lão hóa, bị kẹp sai vị trí hoặc siết lực không đều.
- Bề mặt tiếp xúc không phẳng, có vết xước sâu, không được gia công lại trước khi lắp.
Khi gặp sự cố, kỹ sư nên tiếp cận theo trình tự có hệ thống, tránh can thiệp ngay vào bộ xử lý khi chưa loại trừ các nguyên nhân cơ bản. Một quy trình chẩn đoán điển hình:
Kiểm tra nguồn và phần cứng cơ bản
- Kiểm tra nguồn cấp AC/DC, điện áp, phân cực, tình trạng cầu chì, aptomat.
- Kiểm tra cáp tín hiệu từ đầu dò đến junction box và từ junction box đến bộ xử lý: đo cách điện, kiểm tra continuity, tìm điểm gãy gập.
- Đo điện trở cuộn dây đầu dò (nếu là loại có cuộn kích từ) hoặc kiểm tra trở kháng transducer theo giá trị nhà sản xuất.
- Quan sát trạng thái LED/báo lỗi trên module phát/thu, ghi lại mã lỗi để đối chiếu manual.
Phân lập lỗi bằng thiết bị giả lập
- Dùng thiết bị giả lập NMEA hoặc simulator chuyên dụng để đưa tín hiệu tốc độ giả lập vào các thiết bị nhận (ECDIS, autopilot, VDR) nhằm xác định lỗi nằm ở Speed Log hay ở thiết bị nhận.
- Nếu thiết bị nhận hiển thị đúng với tín hiệu giả lập, khả năng cao lỗi nằm ở bộ xử lý Speed Log hoặc phần transducer.
- Trong một số hệ thống, có thể dùng chế độ “self-test” để kiểm tra riêng kênh phát, kênh thu, mạch xử lý tín hiệu số.
Đánh giá điều kiện môi trường và lắp đặt
- Kiểm tra vị trí tàu, độ sâu nước, tình trạng biển (sóng, gió, dòng chảy) để loại trừ nguyên nhân do điều kiện môi trường.
- Đối chiếu bản vẽ lắp đặt với thực tế để xác định xem đầu dò có nằm trong vùng nhiễu thủy động (gần bow thruster, sea chest, bilge keel) hay không.
- Kiểm tra tình trạng hà bám, sơn phủ trên mặt phát siêu âm, đặc biệt sau thời gian tàu nằm chờ dài ngày.
Đối với chủ tàu, một số lưu ý quan trọng để bảo vệ hệ thống đo tốc độ Speed Log và giảm chi phí bảo trì dài hạn:
- Vệ sinh và bảo dưỡng định kỳ
- Vệ sinh hà bám trên bề mặt đầu dò mỗi lần tàu lên ụ, sử dụng dụng cụ mềm, tránh làm xước bề mặt phát.
- Tuyệt đối không sơn phủ lên mặt phát siêu âm; nếu cần sơn chống hà quanh khu vực, phải che chắn mặt phát cẩn thận.
- Kiểm tra định kỳ tình trạng gioăng, bulong, mặt bích của Gate Valve, thay thế khi có dấu hiệu lão hóa.
- Tối ưu cấu hình lắp đặt
- Ưu tiên lắp đặt Gate Valve cho các hệ thống giá trị cao để có thể rút đầu dò kiểm tra, vệ sinh, thay thế mà không cần đưa tàu lên ụ.
- Trong giai đoạn thiết kế, phối hợp với bộ phận thiết kế thân tàu để chọn vị trí đầu dò tối ưu, giảm nhiễu thủy động và bọt khí.
- Quản lý tài liệu và dữ liệu kỹ thuật
- Lưu trữ đầy đủ tài liệu hiệu chuẩn, sơ đồ đấu nối, nhật ký sự cố, báo cáo Sea Trial và các bản cập nhật phần mềm.
- Thiết lập quy trình ghi nhận mọi can thiệp vào hệ thống đo tốc độ Speed Log (thay đổi tham số, thay đầu dò, cập nhật firmware) để hỗ trợ kỹ sư khi cần phân tích nguyên nhân gốc (root cause analysis).
Tiêu chí lựa chọn máy đo tốc độ tàu biển Speed Log tối ưu cho dự án
Khi đầu tư hệ thống máy đo tốc độ tàu biển Speed Log, chủ tàu, nhà máy đóng tàu và đơn vị tư vấn thiết kế cần tiếp cận theo góc nhìn tổng thể vòng đời (life-cycle) của con tàu: từ giai đoạn thiết kế cơ bản, thiết kế kỹ thuật, đóng mới, chạy thử, khai thác đến sửa chữa – hoán cải. Một cấu hình Speed Log tối ưu không chỉ đáp ứng yêu cầu tuân thủ SOLAS/IMO tại thời điểm đăng kiểm, mà còn phải đảm bảo độ tin cậy, khả năng bảo trì, khả năng tích hợp hệ thống và chi phí vận hành trong suốt 20–30 năm khai thác.
Các tiêu chí quan trọng cần xem xét gồm:
Tuân thủ phân cấp tàu và quy định SOLAS: trước hết cần xác định rõ GT (Gross Tonnage), loại tàu (hàng khô, dầu, khách, container, LNG, offshore support, tàu dịch vụ gió ngoài khơi, tàu nghiên cứu…) và vùng hoạt động (vùng biển quốc tế, ven bờ, nội thủy). Trên cơ sở đó, đối chiếu với các yêu cầu của SOLAS Chương V, các nghị quyết IMO MSC.96(72), IMO A.824(19) và quy định của các tổ chức phân cấp (DNV, ABS, LR, BV, NK, VR…).
Đối với tàu ≥ 50.000 GT, SOLAS yêu cầu phải có hai hệ thống đo tốc độ độc lập. Trong thực tế thiết kế, có thể lựa chọn các cấu hình:
- 01 hệ thống Doppler Speed Log đo SOG/STW làm thiết bị chính, kết hợp 01 hệ thống EM Log đo STW làm thiết bị dự phòng.
- Hai hệ thống Doppler độc lập, mỗi hệ thống có đầu dò riêng, nguồn cấp riêng, đi dây độc lập để tăng mức độ sẵn sàng (redundancy) cho tàu khách, tàu dầu cỡ lớn, tàu LNG.
- Đối với tàu nhỏ hơn, chỉ yêu cầu 01 hệ thống STW, có thể dùng EM Log độc lập, kết hợp nguồn dự phòng từ UPS hoặc nguồn điều hướng khẩn cấp.
Cần kiểm tra kỹ Type Approval Certificate của thiết bị để đảm bảo được chấp nhận bởi phân cấp dự án, đồng thời xác nhận rõ phạm vi phê duyệt (Speed and Distance Measuring Equipment, Doppler Speed Log, Electromagnetic Log…).
Lựa chọn công nghệ: việc chọn giữa Doppler Speed Log và EM Log không chỉ dựa trên chi phí đầu tư ban đầu mà còn phải xét đến yêu cầu điều động, loại hình khai thác và kiến trúc hệ thống điều hướng.
Doppler Speed Log:
- Phù hợp cho tàu lớn, tàu khách, tàu container tốc độ cao, tàu offshore cần điều động chính xác, DP (Dynamic Positioning) hoặc hoạt động trong khu vực chật hẹp.
- Có khả năng đo SOG (Speed Over Ground) bằng phản xạ từ đáy biển (bottom tracking) khi độ sâu nằm trong dải cho phép, đồng thời có thể đo tốc độ ngang (athwartship) phục vụ điều động cập/rời cầu, hỗ trợ hệ thống DP.
- Trong chế độ water tracking, Doppler Speed Log đo STW (Speed Through Water), hữu ích cho tính toán hiệu suất chân vịt, tối ưu tiêu thụ nhiên liệu và đánh giá ảnh hưởng của dòng chảy.
- Độ chính xác cao, ít bị ảnh hưởng bởi độ dẫn điện của nước biển, nhưng phụ thuộc vào điều kiện đáy biển và độ sâu khi sử dụng chế độ SOG.
EM Log (Electromagnetic Log):
- Thích hợp cho tàu thương mại phổ thông, tàu hàng khô, tàu dầu cỡ vừa, tàu dịch vụ ven bờ, nơi yêu cầu chính là STW ổn định, tin cậy.
- Cấu trúc đơn giản, không có bộ phận chuyển động, ít hỏng vặt, chi phí đầu tư và bảo trì thấp, phù hợp làm thiết bị STW độc lập, kinh tế và bền bỉ.
- Độ chính xác phụ thuộc vào độ dẫn điện của nước biển, cần hiệu chỉnh (calibration) phù hợp với vùng nước hoạt động; có thể bị ảnh hưởng khi tàu hoạt động nhiều trong vùng nước lợ hoặc nước ngọt.
- Không đo trực tiếp SOG, thường kết hợp với GPS để hệ thống điều hướng có đủ cả STW và SOG.
Khi lựa chọn công nghệ, nên phân tích thêm các yếu tố: yêu cầu của chủ tàu về fuel efficiency, mức độ tích hợp với VDR, ECDIS, Radar, Autopilot, DP, cũng như khả năng hỗ trợ các chế độ đo đặc biệt (dual axis, three-axis, shallow water mode…).
Phương án lắp đặt cơ khí: cấu hình cơ khí của đầu dò (transducer) ảnh hưởng trực tiếp đến khả năng bảo trì, thời gian dừng tàu và chi phí dock.
- Gate Valve (Sea Valve + Chest): ưu tiên cho các dự án dài hạn, tàu hoạt động liên tục, khó sắp xếp thời gian lên đà. Đầu dò được lắp qua van đáy, cho phép rút/lắp đầu dò khi tàu đang nổi (trong điều kiện an toàn), giảm đáng kể chi phí dừng tàu. Cần thiết kế hố van (sea chest) hợp lý để tránh nhiễu bọt khí và xoáy dòng.
- Tank/Flush Mount: đầu dò lắp cố định, mặt phẳng với đáy tàu hoặc trong két kỹ thuật. Phương án này cho bề mặt đáy tàu “sạch”, giảm lực cản, phù hợp tàu tốc độ cao, nhưng yêu cầu lên đà khi cần thay thế hoặc bảo trì đầu dò. Cần cân nhắc kỹ kế hoạch bảo trì, chu kỳ dock và điều kiện tài chính.
- Vị trí lắp đặt phải tránh vùng nhiễu do bọt khí từ mũi tàu, từ thruster, từ cảm biến khác; đồng thời đảm bảo độ sâu ngập của đầu dò trong mọi trạng thái tải (ballast, full load).
Trong giai đoạn thiết kế, nên phối hợp chặt chẽ giữa naval architect, nhà cung cấp Speed Log và phân cấp để thống nhất bản vẽ lắp đặt, chiều dày đáy tàu, kết cấu gia cường, cũng như quy trình kiểm tra kín nước sau khi lắp.
Dải hoạt động và tiêu chuẩn hiệu suất: ngoài việc thiết bị có Type Approval, cần đọc kỹ Performance Standard để đảm bảo đáp ứng đúng điều kiện khai thác thực tế.
- Kiểm tra dải tốc độ làm việc (ví dụ 0–40 kn, 0–70 kn) và độ phân giải hiển thị, độ trễ (response time) của tín hiệu đo, đặc biệt quan trọng với tàu điều động tinh vi.
- Xem xét dải độ sâu làm việc của Doppler Speed Log ở chế độ bottom tracking; nếu tàu thường xuyên hoạt động ở vùng nước sâu, cần đánh giá khả năng chuyển đổi mượt giữa chế độ bottom tracking và water tracking.
- Đảm bảo thiết bị đáp ứng MSC.96(72), A.824(19) về độ chính xác, khả năng chịu lắc (roll, pitch, yaw), rung động và nhiễu điện từ. Các thông số như sai số cho phép (% của tốc độ thực), dải nhiệt độ môi trường, cấp bảo vệ IP của đầu dò cần được so sánh giữa các hãng.
- Đối với tàu DP hoặc tàu offshore, nên ưu tiên các model có dual-axis hoặc hỗ trợ đo tốc độ ngang, có thuật toán bù chuyển động thân tàu (motion compensation) để giữ độ ổn định tín hiệu.
Tương thích giao diện dữ liệu: trong kiến trúc Nav & Comm hiện đại, Speed Log không chỉ là thiết bị độc lập mà là một nguồn dữ liệu trung tâm cho nhiều hệ thống khác.
- Đảm bảo thiết bị có đủ cổng NMEA 0183 (và/hoặc NMEA 2000, Ethernet nếu cần), hỗ trợ các câu lệnh chuẩn như $VBW (Dual Ground/Water Speed), $VLW (Distance Traveled), $VHW (Water Speed and Heading).
- Kiểm tra khả năng xuất xung (pulse) hoặc relay contact cho các hệ thống yêu cầu tín hiệu dạng xung, ví dụ VDR, Radar, Autopilot đời cũ, hoặc các bộ đếm quãng đường cơ khí.
- Xem xét khả năng cấu hình linh hoạt tốc độ baud, mức điện áp, cách ly galvanic để tránh nhiễu và vòng lặp đất khi kết nối với nhiều thiết bị khác nhau.
- Đối với tàu có hệ thống tích hợp (Integrated Navigation System – INS), nên ưu tiên Speed Log có giao diện Ethernet/Serial Gateway hoặc module mở rộng, giúp đơn giản hóa wiring và dễ dàng mở rộng trong tương lai.
Khi các yếu tố trên được phân tích đầy đủ, hệ thống máy đo tốc độ tàu biển Speed Log sẽ vận hành như một thành phần cốt lõi trong toàn bộ kiến trúc Nav & Comm, cung cấp dữ liệu tốc độ ổn định, chính xác cho Radar, ECDIS, VDR, Autopilot, DP và các hệ thống giám sát hiệu suất, qua đó đảm bảo quá trình đo tốc độ Speed Log luôn đáp ứng yêu cầu an toàn, pháp lý và tối ưu hiệu quả khai thác trong suốt vòng đời con tàu.
Bạn có thể đọc thêm sản phẩm máy đo tốc độ tàu biển tại đây
Cảm ơn bạn đã đọc bài !
Nếu bạn cần hỗ trợ thêm thông tin, xin liên hệ theo,
Thông tin liên hệ và kết nối
MarineZone
Địa chỉ: Số 144, tổ 6, phường Phú Diễn, Hà Nội
Điện thoại/Zalo: 0865.085.436
Website: marinezone.vn
Các mạng xã hội chính thức:










.png)




