










.png)

La Bàn Quang -MarineZone

NGC-5050 GYRO COMPASS -MarineZone
La Bàn Quang FOG Là Gì? Nền Tảng Vật Lý Hiệu Ứng Sagnac
La bàn quang FOG (Fiber Optic Gyroscope) là một dạng con quay quán tính trạng thái rắn (solid-state gyroscope), trong đó phần tử cảm biến chính là một cuộn sợi quang được thiết kế chuyên dụng, kết hợp với kỹ thuật giao thoa ánh sáng kết hợp mạch quang tích hợp (Integrated Optic Circuit – IOC). Không giống các con quay cơ khí truyền thống dựa trên mô-men động lượng của rotor quay, FOG khai thác trực tiếp tính chất sóng của ánh sáng để đo vận tốc góc với độ chính xác rất cao, từ đó suy ra hướng mũi tàu (Heading), độ nghiêng – lắc (Roll/Pitch) và chuyển động nhồi (Heave) trong hệ tọa độ thân tàu.
Trong kiến trúc hiện đại của Hệ thống dẫn đường quán tính (INS) và Hệ thống tham chiếu tư thế & hướng (AHRS), la bàn quang FOG thường được bố trí thành cụm ba con quay quang trực giao (triad), mỗi con quay đo vận tốc quay quanh một trục. Dữ liệu vận tốc góc này được hợp nhất với tín hiệu từ gia tốc kế MEMS hoặc quartz, cùng với cảm biến từ trường và GNSS thông qua các thuật toán lọc tối ưu (thường là Kalman filter) để tạo thành nghiệm ước lượng liên tục cho tư thế (attitude), hướng (heading) và vị trí (position) của tàu. Nhờ đặc tính solid-state, không có bộ phận quay, không cần buồng chân không, FOG có thể hoạt động ổn định trong môi trường rung động, sốc cơ học và nhiệt độ khắc nghiệt mà vẫn duy trì độ trôi (bias drift) thấp.
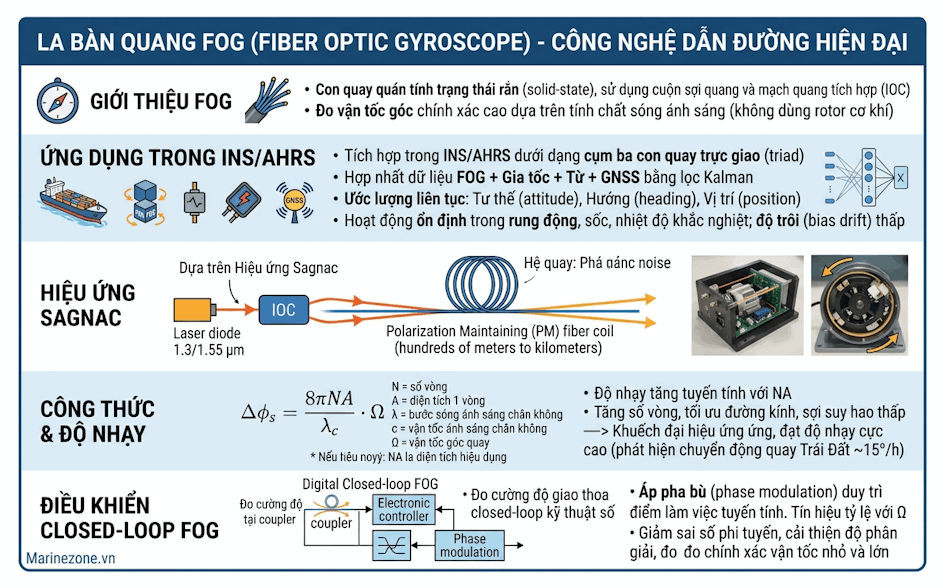
Khác với la bàn con quay cơ học sử dụng rotor quay tốc độ cao, la bàn quang FOG dựa trên Hiệu ứng Sagnac, một hiện tượng giao thoa đặc trưng trong các hệ quy chiếu quay. Một nguồn laser đơn sắc, thường là laser diode bước sóng 1.3 µm hoặc 1.55 µm, được ghép vào một mạch quang tích hợp, sau đó chia thành hai chùm sáng truyền ngược chiều nhau trong một cuộn sợi quang duy trì phân cực (PM fiber) dài hàng trăm mét đến hàng kilômét. Sợi PM được lựa chọn để giảm thiểu trộn phân cực (polarization cross-coupling), vốn là một trong các nguồn nhiễu chính gây trôi zero và giảm độ ổn định dài hạn.
Khi hệ thống đứng yên trong không gian quán tính, hai chùm sáng truyền ngược chiều nhau trong vòng sợi quang sẽ có cùng thời gian lan truyền quang học, nên khi quay trở lại bộ thu, chúng giao thoa tạo nên một mẫu cường độ ổn định. Khi tàu quay quanh trục vuông góc với mặt phẳng vòng sợi, quãng đường quang học hiệu dụng mà mỗi chùm phải đi sẽ khác nhau do sự thay đổi tương đối giữa chuyển động quay của hệ và tốc độ lan truyền của ánh sáng trong vòng. Sự khác biệt này dẫn đến độ lệch pha Sagnac giữa hai chùm, và độ lệch pha đó tỷ lệ thuận với vận tốc góc quay của hệ quy chiếu gắn với tàu.
Độ lệch pha Sagnac Δϕs có thể được mô tả bằng công thức cơ bản:
Δϕs = (8πNA / λc) · Ω
Trong đó: N là số vòng cuộn sợi quang, A là diện tích hình học của một vòng cuộn, λ là bước sóng ánh sáng trong chân không, c là vận tốc ánh sáng trong chân không và Ω là vận tốc góc quay chiếu lên pháp tuyến mặt phẳng vòng sợi. Tích NA chính là diện tích hiệu dụng của vòng Sagnac, cho thấy độ nhạy của FOG tăng tuyến tính với số vòng cuộn và diện tích vòng. Bằng cách tăng số vòng cuộn, tối ưu đường kính cuộn và sử dụng sợi có suy hao thấp, la bàn quang FOG có thể khuếch đại hiệu ứng Sagnac lên nhiều bậc độ lớn, đạt độ nhạy góc cực cao, đủ để phát hiện cả chuyển động quay rất nhỏ do tốc độ quay Trái Đất (~15°/h).
Trong thực tế, FOG không đo trực tiếp pha mà đo cường độ giao thoa tại bộ tách – ghép quang (coupler). Để tuyến tính hóa đáp ứng và mở rộng dải động, các hệ FOG hiện đại thường sử dụng cấu trúc closed-loop (digital closed-loop FOG). Một bộ điều khiển điện tử áp một pha bù (phase modulation) lên một trong hai nhánh quang sao cho duy trì điểm làm việc tại vùng tuyến tính của đường cong giao thoa. Tín hiệu điều khiển cần thiết để giữ cân bằng giao thoa chính là đại lượng tỷ lệ với vận tốc góc Ω. Cách làm này giúp giảm sai số phi tuyến, cải thiện độ phân giải và cho phép đo chính xác cả vận tốc góc rất nhỏ lẫn rất lớn.
Để đạt được hiệu năng cao trong môi trường hàng hải, la bàn quang FOG phải giải quyết nhiều nguồn sai số vật lý và công nghệ, bao gồm:
- Bias drift do trôi nhiệt của nguồn laser, IOC và sợi quang.
- Shupe effect – hiệu ứng do gradient nhiệt dọc theo cuộn sợi gây ra pha giả.
- Polarization non-reciprocity – khác biệt đường đi quang học giữa hai phân cực.
- Backscattering – tán xạ ngược trong sợi gây khóa pha (lock-in) ở vận tốc góc rất nhỏ.
- Vibration-induced noise – nhiễu do rung động cơ khí truyền vào cuộn sợi.
Các nhà sản xuất FOG hàng hải sử dụng nhiều kỹ thuật để giảm thiểu các sai số này, như: cuộn sợi theo cấu trúc đặc biệt (quadrupole winding, octupole winding) để triệt tiêu gradient nhiệt bậc thấp; sử dụng nguồn sáng băng rộng hoặc laser có độ kết hợp thấp để giảm tán xạ ngược; điều khiển nhiệt độ chính xác cho module quang; và áp dụng các thuật toán bù sai số theo mô hình trong bộ xử lý số.
Trong ứng dụng hàng hải, la bàn quang FOG thường được tích hợp trong các khối Gyrocompass FOG, AHRS FOG hoặc INS FOG, cung cấp đồng thời các đại lượng định hướng và chuyển động sau:
- True Heading – Hướng Bắc thật, được suy ra bằng cách kết hợp đo vận tốc góc từ FOG với mô hình quay Trái Đất và vị trí tàu. Đây là chuẩn IMO cho Radar, ECDIS, Autopilot và các hệ thống DP (Dynamic Positioning).
- Roll / Pitch – Độ nghiêng ngang và dọc thân tàu, được tính toán từ tích phân vận tốc góc kết hợp với gia tốc kế. Thông tin này rất quan trọng để ổn định nền tảng cảm biến (sonar, multibeam, camera ổn định) và bù chuyển động cho thiết bị đo đạc.
- Heave / Surge / Sway – Chuyển động tịnh tiến 3 trục, được ước lượng bằng cách lọc và tích phân tín hiệu gia tốc, thường có thêm ràng buộc từ GNSS và mô hình động lực học tàu. Đặc biệt, Heave chính xác là yếu tố then chốt cho khảo sát đáy biển, lắp đặt cấu trúc ngoài khơi và vận hành cần cẩu trên biển.
- Rate of Turn (ROT) – Tốc độ quay mũi tàu, được đo trực tiếp từ FOG với độ trễ rất thấp. ROT là tham số bắt buộc cho hệ thống điều khiển tự động, hỗ trợ điều khiển lái mượt, giảm quá điều khiển và nâng cao an toàn khi điều động trong vùng nước hẹp.
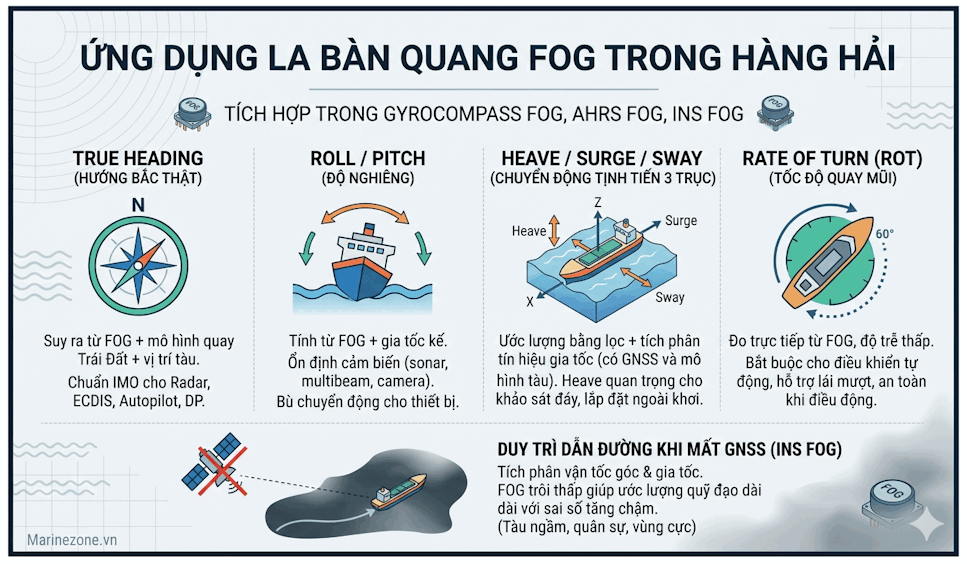
Trong các hệ thống INS FOG cao cấp, dữ liệu từ la bàn quang FOG còn được dùng để duy trì khả năng dẫn đường khi tàu mất hoàn toàn tín hiệu vệ tinh GNSS (GNSS-denied). Bằng cách tích phân vận tốc góc và gia tốc trong hệ tọa độ quán tính, INS có thể tiếp tục ước lượng quỹ đạo tàu trong một khoảng thời gian dài với sai số tăng chậm, nhờ độ trôi thấp của FOG. Điều này đặc biệt quan trọng cho tàu ngầm, tàu quân sự, tàu khảo sát hoạt động ở vùng cực hoặc khu vực bị che khuất vệ tinh.
Nhờ cấu trúc solid-state, không có ổ bi, không có rotor, không cần buồng chân không, la bàn quang FOG đạt độ tin cậy rất cao, thời gian hoạt động liên tục lên tới hàng trăm nghìn giờ. Tuổi thọ dài, kết hợp với chi phí bảo trì thấp và khả năng tự hiệu chuẩn (self-test, built-in test – BIT), khiến FOG trở thành chuẩn mực mới trong ngành dẫn đường hàng hải hiện đại, dần thay thế các gyro cơ khí truyền thống trong nhiều phân khúc tàu thương mại, tàu khảo sát thủy đạc, tàu hỗ trợ ngoài khơi và cả tàu ngầm chiến lược.
Một số ưu điểm kỹ thuật nổi bật của la bàn quang FOG trong môi trường hàng hải có thể tóm tắt:
- Độ chính xác cao: Sai số heading có thể đạt dưới 0.1° khi kết hợp với GNSS và mô hình quay Trái Đất.
- Độ ổn định dài hạn: Bias drift thấp, ít phụ thuộc vào mài mòn cơ khí vì không có bộ phận chuyển động.
- Khả năng chịu rung và sốc: Cấu trúc cuộn sợi và module quang được đúc, cố định chắc chắn, phù hợp với môi trường tàu biển.
- Dải nhiệt độ làm việc rộng: Thiết kế bù nhiệt và điều khiển nhiệt cho phép hoạt động ổn định từ vùng cực lạnh đến vùng nhiệt đới.
- Tích hợp linh hoạt: Giao tiếp số chuẩn (NMEA, Ethernet, CAN, serial) dễ dàng kết nối với Radar, ECDIS, DP, Autopilot và các hệ thống giám sát.
Nhờ những đặc tính này, la bàn quang FOG không chỉ là cảm biến lõi trong các hệ thống dẫn đường mà còn là thành phần quan trọng trong các nền tảng đo đạc độ chính xác cao trên biển, từ khảo sát địa chấn, khảo sát thủy đạc đa tia, đến điều khiển chuyển động chính xác cho ROV, AUV và các cấu trúc nổi ngoài khơi.
Lợi Thế Cốt Lõi Của La Bàn Quang FOG So Với La Bàn Cơ Học
Xu hướng chuyển đổi từ la bàn con quay cơ học sang la bàn quang FOG diễn ra mạnh mẽ trên toàn cầu, đặc biệt trong bối cảnh yêu cầu GNSS-denied navigation ngày càng khắt khe. Không chỉ dừng ở mức “thay thế thiết bị cũ”, FOG đang trở thành một nền tảng cảm biến quán tính trung tâm trong kiến trúc dẫn đường tích hợp (INS/GNSS, INS/USBL, INS/DVL) cho các đội tàu thương mại, tàu khảo sát và tàu quân sự. Các ưu điểm sau đây lý giải vì sao FOG gần như trở thành lựa chọn mặc định trong các dự án đóng mới và nâng cấp hệ thống dẫn đường hiện đại.
Thời Gian Khởi Động Nhanh, Sẵn Sàng Dẫn Đường Trong Vài Phút
Trong các hệ thống la bàn con quay cơ học truyền thống, rotor phải được gia tốc đến tốc độ quay danh định (thường hàng chục nghìn vòng/phút), sau đó hệ thống cần thời gian để:
- Ổn định ma sát ổ bi và lực cản không khí trong buồng chân không.
- Giảm dần các dao động quá độ của rotor và khung gimbal.
- Hoàn tất quá trình căn chỉnh hướng (gyrocompassing) dựa trên thành phần quay của Trái Đất.
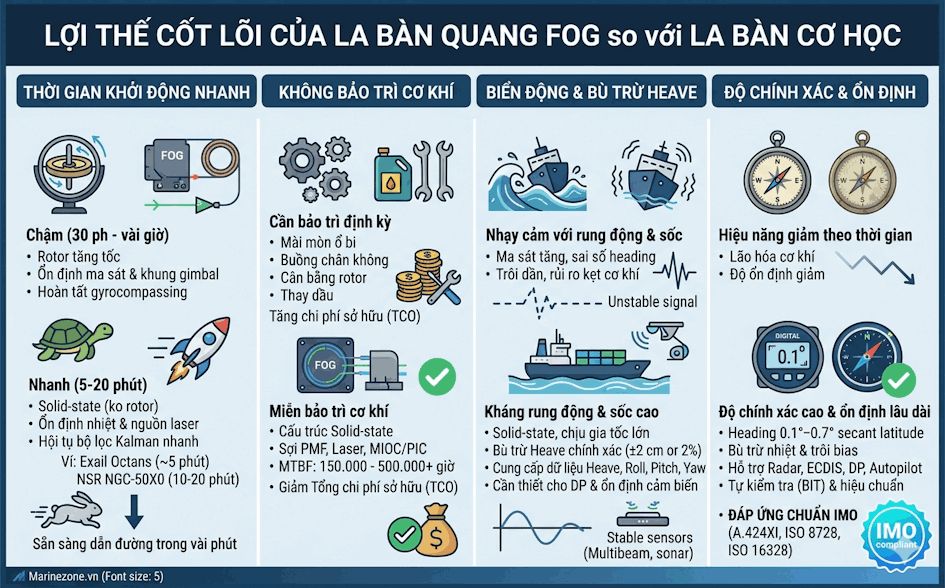
Toàn bộ quá trình này có thể kéo dài từ 30 phút đến vài giờ, đặc biệt trong điều kiện nhiệt độ môi trường thay đổi lớn hoặc khi tàu chịu rung động mạnh. Điều này gây bất tiện cho:
- Tàu cần khởi hành nhanh khỏi cảng, luồng hẹp hoặc khu vực quân sự.
- Tàu hoạt động trong vùng nước hạn chế, cần có dữ liệu heading chính xác để điều động an toàn.
- Các nhiệm vụ khảo sát ngắn, cần “vào việc” gần như ngay sau khi đến khu vực làm việc.
Ngược lại, la bàn quang FOG không có phần tử quay cơ khí, không cần thời gian tăng tốc rotor, nên thời gian settling time chủ yếu phụ thuộc vào:
- Thời gian ổn định nhiệt của module quang và nguồn laser.
- Thời gian hội tụ của bộ lọc quán tính (thường là Kalman mở rộng hoặc biến thể).
- Chất lượng và độ động học của dữ liệu hỗ trợ (tốc độ tàu, GNSS, log tốc độ, DVL…).
Trong thực tế, các hệ thống FOG hàng hải hiện đại chỉ cần từ 5 đến 20 phút để hội tụ về hướng Bắc thật với độ chính xác đáp ứng chuẩn IMO. Một số ví dụ điển hình:
- Exail Octans: thời gian ổn định khoảng 5 phút, sử dụng kiến trúc INS FOG 3 trục kết hợp thuật toán gyrocompassing tiên tiến, rất phù hợp cho tàu khảo sát, tàu DP, tàu dịch vụ ngoài khơi cần khởi động nhanh và thường xuyên phải tắt/mở thiết bị.
- NSR NGC-50X0 Series: thời gian ổn định 10–20 phút, tối ưu cho tàu thương mại, tàu container, tàu chở dầu, nơi yêu cầu tuân thủ đầy đủ chuẩn IMO nhưng không cần thời gian khởi động quá ngắn như tàu DP.
Trong giai đoạn khởi động, la bàn quang FOG thực hiện quá trình ước lượng hướng Bắc thật thông qua:
- Đo tốc độ quay góc 3 trục bằng các gyroscope quang dựa trên hiệu ứng Sagnac.
- Kết hợp với dữ liệu gia tốc 3 trục từ accelerometer MEMS hoặc quartz để xác định phương trọng lực.
- Sử dụng thuật toán Kalman filter hoặc strapdown inertial navigation để tách thành phần quay của Trái Đất khỏi chuyển động của tàu.
- Tích hợp tín hiệu GNSS (nếu có) để ràng buộc vận tốc và vị trí, giúp bộ lọc hội tụ nhanh hơn và giảm sai số heading ban đầu.
Điều kiện quan trọng trong giai đoạn này là tàu và khối cảm biến không được di chuyển đột ngột, không quay vòng gắt hoặc tăng/giảm tốc mạnh, nhằm tránh gây nhiễu cho quá trình ước lượng ban đầu. Với các hệ thống cao cấp, nhà sản xuất thường cung cấp các chế độ:
- Static alignment: tàu gần như đứng yên, cho độ chính xác heading cao nhất.
- Dockside alignment: cho phép tàu dịch chuyển nhẹ trong cảng, bộ lọc vẫn hội tụ được.
- In-motion alignment: cho phép căn chỉnh khi tàu đang chạy, phù hợp cho ứng dụng quân sự hoặc nhiệm vụ không thể dừng tàu.
Không Cần Bảo Trì Cơ Khí, Giảm Mạnh Chi Phí Sở Hữu
Trong các hệ thống gyro cơ học, toàn bộ nguyên lý hoạt động dựa trên một rotor quay tốc độ cao được treo trên hệ thống gimbal nhiều bậc tự do. Điều này kéo theo:
- Mài mòn ổ bi: ổ bi chịu tải liên tục, tốc độ quay cao, dễ xuống cấp, gây tăng ma sát, tăng nhiệt, tăng sai số.
- Yêu cầu buồng chân không: để giảm lực cản không khí, rotor thường quay trong buồng chân không, cần hệ thống bơm, phớt, gioăng… dễ lão hóa.
- Cân bằng động rotor: sau thời gian dài, rotor có thể mất cân bằng, gây rung, tăng sai số và nguy cơ hỏng hóc.
- Thay dầu, bảo dưỡng định kỳ: dầu bôi trơn, dầu giảm chấn phải được thay thế theo chu kỳ, kéo theo chi phí vật tư và nhân công.
Hệ quả là chủ tàu phải chấp nhận:
- Chi phí bảo trì định kỳ cao, bao gồm cả phụ tùng chính hãng và dịch vụ kỹ thuật chuyên sâu.
- Thời gian dừng tàu hoặc hạn chế khai thác khi thiết bị phải tháo dỡ, gửi đi sửa chữa hoặc đại tu.
- Rủi ro mất dữ liệu heading ổn định trong thời gian chờ sửa chữa, ảnh hưởng đến an toàn hàng hải.
La bàn quang FOG loại bỏ hoàn toàn các thành phần cơ khí chuyển động. Cấu trúc chính của hệ thống bao gồm:
- Sợi quang duy trì phân cực (Polarization Maintaining Fiber – PMF) cuộn thành nhiều vòng trong module quang học, tạo chiều dài đường truyền đủ lớn để tăng độ nhạy với hiệu ứng Sagnac.
- Nguồn laser bán dẫn công suất thấp, tuổi thọ cao, được điều khiển nhiệt độ chính xác để đảm bảo độ ổn định bước sóng.
- MIOC (Multi-Integrated Optical Circuit) hoặc PIC tích hợp các chức năng chia chùm, điều biến pha, trộn tín hiệu quang trên một chip quang, giảm số lượng linh kiện rời và tăng độ ổn định.
- Bộ thu quang (photodiode) độ nhiễu thấp, kết hợp với DSP hoặc FPGA để thực hiện giải điều chế pha, bù trừ phi tuyến, hiệu chỉnh nhiệt độ và tuyến tính hóa đáp tuyến.
Nhờ cấu trúc solid-state, không có ma sát cơ học, không cần dầu bôi trơn, không có buồng chân không, MTBF (Mean Time Between Failures) của các hệ thống la bàn quang FOG hiện đại có thể đạt từ 150.000 giờ đến trên 500.000 giờ. Điều này tương đương:
- Hơn 17–57 năm hoạt động liên tục về mặt thống kê, tùy cấu hình và điều kiện môi trường.
- Trong thực tế, nhiều hệ thống FOG trên tàu khảo sát, tàu ngầm ROV support đã vận hành ổn định 10–15 năm mà chỉ cần kiểm tra định kỳ ở mức “inspection”, không phải đại tu cơ khí.
Đối với chủ tàu, lợi ích kinh tế thể hiện rõ ở Tổng chi phí sở hữu (TCO) giảm mạnh:
- Giảm chi phí phụ tùng cơ khí, dầu mỡ, ổ bi, cụm rotor.
- Giảm chi phí thuê chuyên gia đến tàu hoặc chi phí tháo gửi thiết bị về xưởng.
- Giảm thời gian tàu phải dừng hoặc hạn chế hoạt động do thiết bị dẫn đường không sẵn sàng.
- Kéo dài chu kỳ nâng cấp, giúp tối ưu hóa vòng đời đầu tư thiết bị.
Khả Năng Làm Việc Trong Biển Động, Bù Trừ Heave Chính Xác Cao
Môi trường biển luôn tồn tại sóng, rung động, va đập cơ học từ máy chính, chân vịt, sóng va vào mạn tàu, thao tác cẩu, thả neo, ROV… Các gyro cơ học với cấu trúc rotor – gimbal nhạy cảm với:
- Rung động tần số cao từ động cơ, hộp số, chân vịt.
- Sốc cơ học khi tàu va đập sóng lớn hoặc khi thiết bị bị tác động cơ học đột ngột.
- Độ nghiêng lớn, chuyển động lắc ngang (roll) và lắc dọc (pitch) biên độ cao.
Những tác động này có thể dẫn đến:
- Tăng ma sát ổ bi, tăng nhiệt, giảm tuổi thọ.
- Dao động cơ học truyền vào rotor, gây sai số heading tức thời hoặc trôi dần.
- Nguy cơ kẹt cơ khí, mất khả năng quay tự do của rotor trong trường hợp sốc mạnh.
La bàn quang FOG với cấu trúc solid-state gần như miễn nhiễm với rung động và sốc cơ học ở mức mà tàu biển thường gặp. Các cảm biến quán tính (gyroscope quang, accelerometer) được gắn cứng trên một khối cơ khí chắc chắn, được thiết kế để chịu:
- Gia tốc sốc lên đến hàng chục g, tùy tiêu chuẩn quân sự hoặc hàng hải.
- Rung động liên tục trong dải tần rộng mà không làm suy giảm hiệu năng đo.
- Độ nghiêng lớn, kể cả khi tàu lật sóng hoặc hoạt động trong điều kiện thời tiết khắc nghiệt.
Các hệ thống FOG hàng hải cao cấp còn tích hợp thuật toán Smart Heave hoặc các biến thể heave filter tiên tiến, cho phép:
- Đo chuyển động nhồi thẳng đứng (heave) với độ chính xác tới 2 cm hoặc 2% biên độ sóng, tùy điều kiện biển và cấu hình cảm biến.
- Cung cấp dữ liệu heave thời gian thực cho:
- Tàu khảo sát thủy đạc sử dụng multibeam, singlebeam, sub-bottom profiler.
- Tàu lắp đặt cáp cần kiểm soát độ sâu chôn cáp và độ căng cáp.
- Tàu hỗ trợ giàn khoan (PSV, AHTS) trong các thao tác thả neo, tiếp tế.
- Cần cẩu ngoài khơi (offshore crane) cần bù trừ chuyển động tàu khi nâng hạ tải trọng lớn.
- Ổn định nền tảng cho các cảm biến sonar, multibeam, USBL, camera quan sát dưới nước, giúp:
- Giảm nhiễu do chuyển động tàu trong dữ liệu đo sâu và ảnh sonar.
- Cải thiện độ chính xác định vị mục tiêu dưới nước.
- Tăng chất lượng dữ liệu cho xử lý hậu kỳ (post-processing).
Nhờ khả năng bù trừ heave chính xác và đo lường đầy đủ 6 bậc tự do (surge, sway, heave, roll, pitch, yaw), la bàn quang FOG trở thành thành phần không thể thiếu trong các hệ thống DP (Dynamic Positioning). Trong các hệ thống DP cấp DP2, DP3, dữ liệu từ FOG INS thường được:
- Kết hợp với GNSS vi sai, DGPS, RTK để giữ vị trí tàu với sai số rất nhỏ trong điều kiện sóng gió phức tạp.
- Dùng làm nguồn heading và motion tham chiếu cho hệ thống tham chiếu vị trí tương đối (taut wire, laser, radar reference…).
- Đảm bảo tính sẵn sàng cao ngay cả khi mất GNSS, nhờ khả năng dẫn đường quán tính độc lập trong thời gian dài.
Độ Chính Xác Cao, Ổn Định Lâu Dài, Đáp Ứng Chuẩn IMO
Các hệ thống la bàn quang FOG hàng hải đạt chuẩn IMO được thiết kế để cung cấp dữ liệu heading và motion với độ chính xác cao, ổn định theo thời gian và ít bị ảnh hưởng bởi điều kiện môi trường. Về mặt thông số kỹ thuật, các hệ thống này có thể đạt:
- Độ chính xác Heading từ 0.1° đến 0.7° secant latitude cho tàu mặt nước thương mại, đảm bảo đáp ứng yêu cầu của IMO đối với la bàn con quay dùng cho điều động, radar, ECDIS và autopilot.
- Đối với phân khúc quân sự, tàu ngầm, AUV/ROV, các hệ thống INS FOG cao cấp có thể đạt sai số hướng cỡ 0.01° sau căn chỉnh, với độ trôi vị trí chỉ 1 hải lý sau 120–360 giờ hoạt động độc lập dưới đáy biển, không có GNSS.
Độ chính xác này không chỉ đáp ứng mà còn vượt xa yêu cầu của các tiêu chuẩn:
- IMO A.424(XI): quy định về tính năng và yêu cầu thử nghiệm đối với la bàn con quay dùng trên tàu biển.
- ISO 8728:2024: tiêu chuẩn về yêu cầu tính năng và phương pháp thử cho la bàn con quay và hệ thống heading.
- ISO 16328:2014: tiêu chuẩn liên quan đến hệ thống định hướng và thiết bị đo chuyển động tàu.
Nhờ đó, dữ liệu heading và motion từ FOG có thể được sử dụng làm nguồn tham chiếu tin cậy cho:
- Radar: đảm bảo ổn định hình ảnh, hỗ trợ ARPA, AIS overlay chính xác.
- ECDIS: hiển thị hướng tàu, track, route monitoring với sai số nhỏ, hỗ trợ quyết định điều động an toàn.
- Autopilot: giữ hướng tàu ổn định, giảm dao động heading, tối ưu tiêu thụ nhiên liệu.
- VDR: ghi lại dữ liệu heading và motion chính xác phục vụ điều tra tai nạn, phân tích hành trình.
- Các hệ thống an toàn và điều khiển khác trên tàu như conning display, track control, DP console.
Về độ ổn định lâu dài, FOG có ưu thế rõ rệt so với gyro cơ học ở các khía cạnh:
- Độ trôi bias gyroscope thấp và có thể được hiệu chỉnh bằng thuật toán, không phụ thuộc vào mài mòn cơ khí.
- Độ nhạy nhiệt được bù trừ bằng cảm biến nhiệt và mô hình hiệu chỉnh trong DSP.
- Không có ma sát cơ học, nên không xuất hiện hiện tượng “lão hóa” do mòn ổ bi, thay đổi đặc tính rotor.
Trong các hệ thống INS FOG cao cấp, nhà sản xuất thường cung cấp các chế độ tự kiểm tra (BIT – Built-In Test) và tự hiệu chuẩn (self-calibration), giúp hệ thống:
- Giám sát liên tục tình trạng nguồn laser, photodiode, nhiệt độ module quang.
- Phát hiện sớm các sai lệch bất thường, cảnh báo thuyền viên trước khi ảnh hưởng đến an toàn.
- Duy trì hiệu năng đo heading và motion ổn định trong suốt vòng đời thiết bị.
Các Dòng La Bàn Quang FOG Hàng Hải Tiêu Biểu
Thị trường la bàn quang FOG hàng hải hiện nay được dẫn dắt bởi một số nhà sản xuất lớn, cung cấp giải pháp cho nhiều phân khúc: tàu hàng thương mại, tàu khách, tàu khảo sát địa chấn – địa hình, tàu công trình – dịch vụ ngoài khơi, tàu hải quân, tàu ngầm và các phương tiện tự hành dưới nước (AUV/ROV). Trong đó, hai hệ sinh thái nổi bật trong phân khúc thương mại và dân sự là NSR Marine và Exail (iXblue), đại diện cho hai cách tiếp cận khác nhau: một bên tập trung vào gyrocompass FOG chuẩn IMO cho tàu biển, bên còn lại tập trung vào hệ thống dẫn đường quán tính FOG tích hợp sâu cho các nhiệm vụ phức tạp.
Về mặt công nghệ, cả hai đều sử dụng nguyên lý giao thoa Sagnac trong sợi quang, nhưng cách tối ưu hóa vòng sợi, thuật toán lọc, bù sai số (bias, scale factor, non-linearity) và tích hợp với cảm biến phụ trợ (accelerometer, GNSS, DVL…) khác nhau, tạo nên sự khác biệt về độ chính xác, độ ổn định dài hạn, cũng như khả năng tích hợp vào hệ thống điều khiển – dẫn đường tổng thể trên tàu.
La Bàn Quang NSR NGC-50X0 Series – Giải Pháp Gyrocompass FOG Chuẩn IMO
NSR NGC-50X0 Series là dòng la bàn quang FOG được thiết kế chuyên biệt cho tàu biển thương mại, thay thế trực tiếp cho gyrocompass cơ khí truyền thống. Hệ thống được tối ưu để đáp ứng đầy đủ các yêu cầu của IMO và MED Wheelmark, đồng thời giữ cấu trúc lắp đặt, giao diện tín hiệu tương thích với hầu hết autopilot, radar, ECDIS hiện có trên thị trường.
Dòng sản phẩm bao gồm các model với cấp chính xác khác nhau, cho phép chủ tàu lựa chọn phù hợp với loại tàu, tuyến hoạt động và ngân sách:
- NGC-5010 – Độ chính xác Heading khoảng 0.1° secant latitude, phù hợp cho tàu container cỡ lớn, tàu chở LNG, tàu du lịch, nơi yêu cầu độ chính xác cao cho điều khiển tự động và tối ưu tuyến đường.
- NGC-5030 – Độ chính xác Heading khoảng 0.3° secant latitude, thường được lựa chọn cho tàu hàng tổng hợp, tàu chở dầu/hoá chất, tàu dịch vụ ngoài khơi.
- NGC-5050 – Độ chính xác Heading khoảng 0.5° secant latitude, đáp ứng tốt cho tàu cỡ vừa, tàu công trình, tàu kéo, nơi chi phí đầu tư là yếu tố quan trọng.
- NGC-5070 – Độ chính xác Heading khoảng 0.7° secant latitude, phù hợp cho tàu làm việc gần bờ, tàu nội địa, tàu công vụ, nơi yêu cầu chuẩn IMO nhưng không cần độ chính xác quá cao.
Khái niệm secant latitude phản ánh việc sai số heading tăng nhẹ theo vĩ độ do thành phần quay của Trái Đất chiếu lên mặt phẳng cảm biến. Với cấu trúc FOG, NSR tối ưu thuật toán bù vĩ độ, giúp sai số thực tế ổn định và lặp lại, đặc biệt quan trọng khi tàu hoạt động ở vĩ độ cao.
Các hệ thống la bàn quang FOG NGC-50X0 đạt các chứng nhận quan trọng, đảm bảo khả năng lắp đặt như một gyrocompass chính thức trên tàu biển:
- IMO A.424(XI) – Yêu cầu đối với gyrocompass trên tàu biển, bao gồm độ chính xác, độ ổn định, thời gian khởi động, khả năng duy trì heading khi tàu quay, lắc, tròng trành.
- ISO 8728:2024 – Tiêu chuẩn về tính năng, giao diện hiển thị, đơn vị đo, cảnh báo, đảm bảo người lái tàu và hệ thống trên buồng lái nhận được thông tin heading một cách nhất quán.
- ISO 16328:2014 – Tiêu chuẩn cho hệ thống gyrocompass và heading reference, quy định chi tiết về hiệu năng động, khả năng chịu rung, sốc, nhiệt độ, cũng như tính tương thích điện từ.
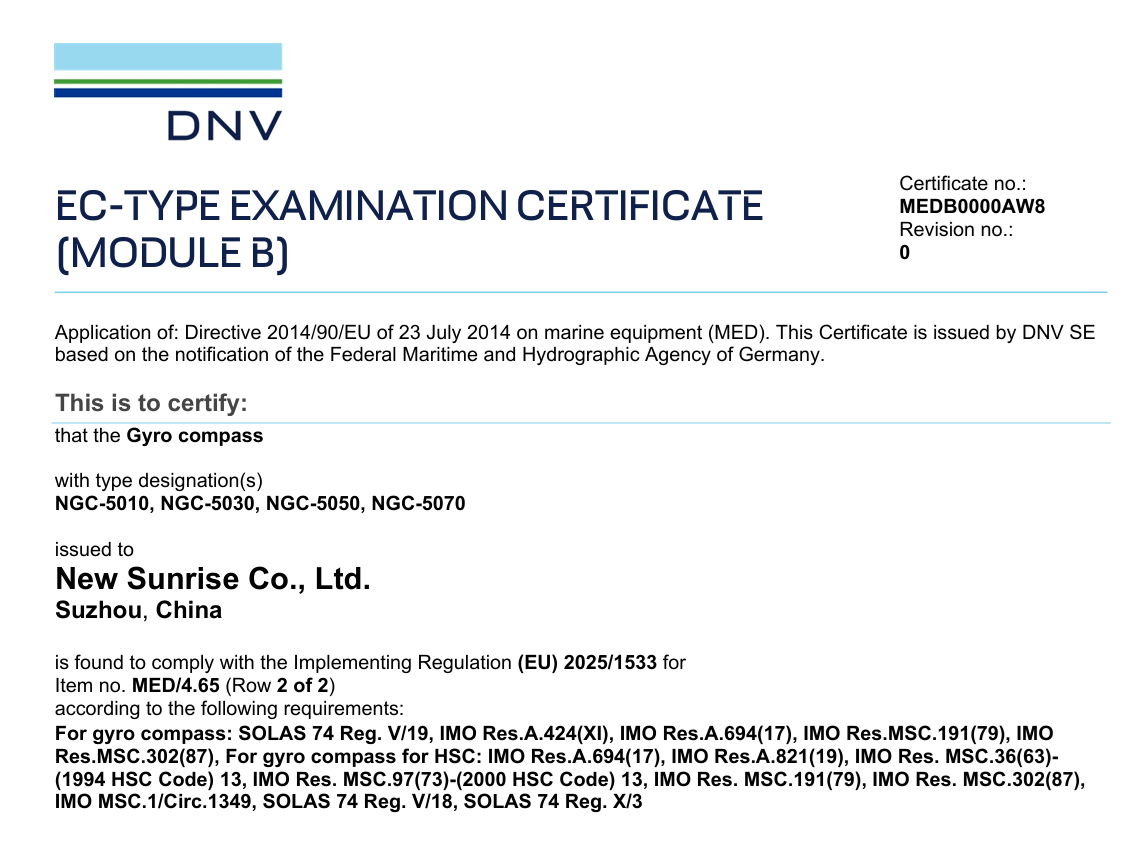
- MED Module B/D (Wheelmark) – Chứng nhận thiết bị hàng hải châu Âu do DNV cấp, cho phép lắp đặt trên tàu mang cờ EU và nhiều quốc gia chấp nhận MED như một chuẩn tham chiếu.
Về mặt giao diện và vận hành, la bàn quang FOG NSR được thiết kế để thuyền viên dễ tiếp cận, đồng thời kỹ sư tích hợp hệ thống có đủ công cụ cấu hình – giám sát:
- Màn hình LCD 7-inch cảm ứng màu chạy hệ điều hành Android, giao diện trực quan, hỗ trợ hiển thị heading số, la bàn vòng, trạng thái cảm biến, cảnh báo, nhật ký lỗi. Giao diện có thể cấu hình để phù hợp với bố trí buồng lái và thói quen vận hành.
- Hệ thống quản lý cảnh báo tập trung (BAM) tích hợp, tương thích với Bridge Alert Management, cho phép phân loại mức độ cảnh báo (cảnh báo hệ thống, cảnh báo heading, cảnh báo nguồn), truyền thông tin cảnh báo tới hệ thống BAM chung của buồng lái.
- Thời gian khởi động và ổn định khoảng 10–20 phút, phụ thuộc vào điều kiện chuyển động tàu và cấu hình. Trong giai đoạn này, hệ thống sử dụng thuật toán căn chỉnh (alignment) để ước lượng bias, xác lập hướng Bắc thật dựa trên quay Trái Đất.
- Nhiều cổng xuất RS422 chuẩn NMEA 0183 với các câu dữ liệu phổ biến như HDT, HDG, THS, ROT…, cho phép kết nối trực tiếp với Autopilot, Radar, ECDIS, VDR, AIS và các thiết bị khác mà không cần bộ chuyển đổi trung gian. Một số cấu hình có thể hỗ trợ thêm giao thức Ethernet hoặc Modbus tùy yêu cầu tích hợp.
Về mặt kiến trúc, la bàn quang FOG NSR thường bao gồm một đơn vị cảm biến FOG đặt tại vị trí ít rung, ít từ trường nhiễu (thường ở khu vực gần trọng tâm tàu) và một hoặc nhiều repeater/indicator trên buồng lái. Thiết kế dạng module giúp việc bảo trì, thay thế, nâng cấp thuận tiện, giảm thời gian tàu phải dừng khai thác.
Nhờ cấu trúc ITAR-free, la bàn quang FOG NSR có thể được cung cấp, lắp đặt và bảo hành trên phạm vi toàn cầu mà không vướng các rào cản kiểm soát xuất khẩu vũ khí. Điều này đặc biệt quan trọng với các đội tàu thương mại đa quốc tịch, tàu dịch vụ ngoài khơi hoạt động ở nhiều vùng biển, cũng như các xưởng đóng tàu cần giải pháp ổn định, không phụ thuộc giấy phép xuất khẩu quốc phòng. Chi phí vòng đời (life-cycle cost) cũng được tối ưu nhờ không có bộ phận quay cơ khí, giảm đáng kể nhu cầu bảo dưỡng định kỳ so với gyrocompass truyền thống.
Hệ Sinh Thái La Bàn Quang Exail (iXblue) – Octans, Quadrans, Phins, Marins
Exail (tiền thân là iXblue) là nhà sản xuất hàng đầu thế giới về la bàn quang FOG và hệ thống dẫn đường quán tính cho hàng hải, quốc phòng và không gian. Điểm mạnh cốt lõi của Exail là tự chủ hoàn toàn chuỗi cung ứng, từ sản xuất sợi quang có độ ổn định pha cao, module quang học, đến ASIC và chip xử lý tín hiệu số chuyên dụng. Nhờ đó, Exail kiểm soát chặt chẽ các tham số nhiễu, trôi, nhiệt độ, cho phép đạt hiệu năng rất cao trong thời gian dài mà không cần hiệu chuẩn lại thường xuyên.
Trong lĩnh vực hàng hải, các dòng sản phẩm tiêu biểu gồm:
- Octans 9 & Quadrans – Hệ thống AHRS FOG chuyên dụng cho tàu khảo sát, tàu DP, tàu dịch vụ ngoài khơi, nơi yêu cầu dữ liệu tư thế – chuyển động chính xác để bù trừ cho sonar, multibeam, Lidar, ROV launch & recovery.
Đặc trưng kỹ thuật của Octans 9 & Quadrans bao gồm:
- Độ chính xác Heading độc lập khoảng 0.1° seclat, đạt được nhờ vòng sợi quang có độ dài tối ưu, thuật toán lọc Kalman mở rộng và mô hình hoá chi tiết sai số gyro – accelerometer. Điều này cho phép hệ thống cung cấp heading ổn định ngay cả khi tàu chịu ảnh hưởng sóng lớn, chuyển động phức tạp.
- Khi kết hợp GNSS (dual-antenna GNSS hoặc GNSS compass), độ chính xác Heading có thể đạt tới 0.05°. Trong cấu hình này, AHRS FOG và GNSS hỗ trợ lẫn nhau: FOG làm mượt dữ liệu GNSS, trong khi GNSS giúp hạn chế trôi dài hạn của hệ thống quán tính.
- Tích hợp Smart Heave với sai số heave chỉ khoảng 5 cm, sử dụng thuật toán dự đoán – bù trễ (predictive heave) để cung cấp giá trị heave thời gian thực có độ trễ thấp, rất quan trọng cho hoạt động khảo sát đáy biển, đặt cáp, đặt ống, hoặc vận hành cần cẩu ngoài khơi.
- Cung cấp đầy đủ dữ liệu Roll, Pitch, Heave, Surge, Sway, ROT, cùng với tốc độ góc và gia tốc ba trục. Các dữ liệu này được xuất qua nhiều giao thức (NMEA, Ethernet, serial) để tích hợp với hệ thống DP, hệ thống khảo sát, motion sensor interface của multibeam echo sounder.
Nhờ cấu trúc FOG không nhạy với từ trường, Octans 9 & Quadrans có thể lắp đặt linh hoạt trên tàu có nhiều thiết bị điện công suất lớn, nơi la bàn từ hoặc fluxgate thường bị nhiễu. Độ ổn định bias thấp giúp hệ thống duy trì hiệu năng cao trong suốt vòng đời, giảm nhu cầu hiệu chuẩn lại.
- Phins & Marins – Dòng INS FOG cao cấp cho tàu ngầm, AUV/ROV, phương tiện dưới biển sâu và các nền tảng hải quân chiến lược, nơi GNSS không khả dụng trong thời gian dài và yêu cầu độ tin cậy cực cao.
Đối với các hệ thống này, Exail kết hợp FOG với accelerometer cấp chiến lược, đôi khi bổ sung DVL, pressure sensor, log tốc độ để tạo thành một hệ thống dẫn đường quán tính hoàn chỉnh:
- Dòng Marins M7, M11 có khả năng duy trì dẫn đường tự chủ dưới đáy biển trong nhiều tuần, sử dụng mô hình động học tàu, ràng buộc độ sâu, bản đồ đáy biển (trong một số cấu hình) để giảm trôi vị trí.
- Độ trôi vị trí chỉ khoảng 1 hải lý sau 120–360 giờ hoạt động không GNSS, tuỳ cấu hình cảm biến phụ trợ. Mức trôi này được xem là rất thấp trong phân khúc INS chiến lược, cho phép tàu ngầm hoặc AUV thực hiện nhiệm vụ dài ngày mà vẫn duy trì được độ chính xác vị trí chấp nhận được cho tác chiến hoặc khảo sát.
- Đáp ứng yêu cầu khắt khe của hải quân và các nhiệm vụ khảo sát chiến lược, bao gồm khả năng chịu sốc, rung, áp suất cao, nhiễu điện từ, cũng như yêu cầu bảo mật, an toàn thông tin. Nhiều cấu hình được thiết kế để tích hợp trực tiếp với hệ thống chiến đấu, sonar, hệ thống điều khiển tàu ngầm.
Các hệ thống la bàn quang FOG Exail đều đạt chuẩn IMO cho các ứng dụng hàng hải thương mại khi được cấu hình ở chế độ heading reference, đồng thời được bảo hành dài hạn (tới 5 năm cho một số dòng), phản ánh độ tin cậy và tuổi thọ cao của phần cứng FOG. Việc ITAR-free giúp các chủ tàu, nhà thầu và xưởng đóng tàu dễ dàng triển khai trên phạm vi toàn cầu mà không gặp rào cản pháp lý liên quan đến xuất khẩu công nghệ quốc phòng, đặc biệt quan trọng với các dự án đa quốc gia, dự án ngoài khơi, hoặc các chương trình nghiên cứu – khảo sát cần chia sẻ thiết bị giữa nhiều quốc gia.
Trong thực tế triển khai, hệ sinh thái Exail thường được sử dụng như “trái tim dẫn đường” cho toàn bộ hệ thống: INS cung cấp heading, attitude, vị trí, tốc độ cho radar, ECDIS, hệ thống DP, sonar, ROV control, trong khi các cảm biến ngoài (GNSS, DVL, log, gyro phụ) được tích hợp vào INS để tạo thành một mạng cảm biến hợp nhất. Cách tiếp cận này khác với NSR, vốn tập trung vào việc cung cấp một gyrocompass FOG chuẩn IMO làm nguồn heading chính, sau đó các hệ thống khác trên tàu sử dụng heading này như một tham chiếu độc lập.
Retrofitting: Nâng Cấp Từ La Bàn Cơ Sang La Bàn Quang FOG
Một trong những bài toán thực tế phổ biến trên tàu biển hiện nay là làm thế nào để thay thế la bàn cơ học (gyro cơ) cũ bằng la bàn quang FOG (Fiber Optic Gyrocompass) mà vẫn tận dụng tối đa hạ tầng sẵn có: hệ thống cáp tín hiệu, repeater, Control Unit, các kết nối tới Radar, ECDIS, Autopilot, VDR… mà không phải dừng tàu lâu, không phải “đại tu” toàn bộ mạng tín hiệu. Khái niệm Retrofitting FOG chính là cách tiếp cận kỹ thuật nhằm tích hợp công nghệ la bàn quang hiện đại vào kiến trúc hệ thống dẫn đường hiện hữu, với mức can thiệp tối thiểu nhưng hiệu quả tối đa.
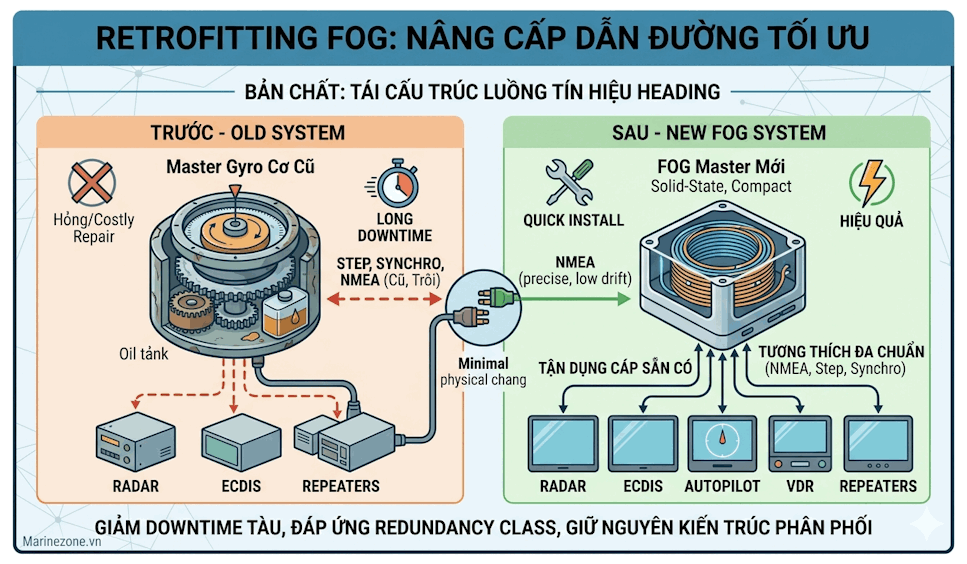
Về bản chất, retrofitting không chỉ là “thay cái cũ bằng cái mới”, mà là quá trình tái cấu trúc luồng tín hiệu Heading, đảm bảo:
- Tín hiệu Heading từ FOG tương thích với chuẩn tín hiệu mà hệ thống cũ đang sử dụng (NMEA, Step, Synchro, Pulse, Contact, v.v.).
- Giữ nguyên hoặc tối ưu hóa kiến trúc phân phối Heading tới Radar, ECDIS, AIS, Autopilot, VDR, DP, conning display, steering repeater…
- Giảm thiểu thời gian downtime của tàu, có thể thi công trong thời gian tàu neo, tàu chờ hàng hoặc thậm chí trong hành trình (nếu điều kiện cho phép).
- Đảm bảo tuân thủ các yêu cầu của Class/Flag về redundancy, tính sẵn sàng và độ chính xác của Heading.
Trong thực tế triển khai, quá trình retrofitting la bàn quang FOG thường rơi vào bốn kịch bản chính, tùy thuộc vào tình trạng hệ thống cũ, cấu trúc mạng tín hiệu trên tàu và yêu cầu của chủ tàu, phòng kỹ thuật hoặc hãng quản lý.
Các Kịch Bản Nâng Cấp La Bàn Quang FOG Trên Tàu Biển
Các kịch bản dưới đây tập trung vào việc tối ưu chi phí – hiệu quả – thời gian dừng tàu, đồng thời đảm bảo tính tương thích điện – điện tử – cơ khí giữa hệ thống FOG mới và hệ thống gyro cơ cũ.
Option 1 – Chỉ Thay Master Compass, Giữ Lại Control Unit Cũ
Đây là phương án phổ biến khi la bàn cơ mẹ (master compass) bị hỏng, trôi nhiều, hoặc chi phí sửa chữa quá cao, trong khi khối điều khiển (Control Unit), repeater và mạng cáp tín hiệu vẫn còn tốt. Mục tiêu là biến FOG thành “nguồn Heading mới” nhưng vẫn để Control Unit cũ đóng vai trò trung tâm phân phối tín hiệu.
Quy trình kỹ thuật chi tiết thường bao gồm:
- Tháo bỏ quả la bàn cơ cũ (ví dụ TG-8000, STD22, Navigat X, v.v.), bao gồm cả phần gimbal, sensor unit, nếu cần.
- Thiết kế giá đỡ, bệ lắp hoặc khung adapter để lắp la bàn quang FOG mới tại vị trí tương đương (hoặc vị trí tối ưu hơn về rung động, từ trường, nhiệt độ).
- Kéo cáp tín hiệu từ FOG về bộ giao tiếp (Interface Unit) của FOG (ví dụ NGC-512 hoặc tương đương), sau đó từ Interface Unit đấu nối trực tiếp vào Control Unit cũ qua các chân tín hiệu tương ứng (chẳng hạn từ cổng P12 đến TB1, hoặc các terminal block được chỉ định trong manual của hãng).
- Giữ nguyên toàn bộ hệ thống repeater, cáp tín hiệu Heading đến Radar, ECDIS, Autopilot, VDR, AIS, DP… vốn đang lấy tín hiệu từ Control Unit cũ.
- Thực hiện cấu hình tham số trên FOG (heading offset, alignment, damping, NMEA sentence type & baudrate) sao cho phù hợp với yêu cầu của Control Unit cũ (ví dụ cần HDT/HDG/HDT+ROT, 4800/9600 bps, checksum, talker ID, v.v.).
Trong cấu hình này, Control Unit cũ vẫn phải được duy trì cấp nguồn vì nó tiếp tục làm nhiệm vụ:
- Nhận tín hiệu Heading dạng số (NMEA, RS-422/RS-232) hoặc dạng xung từ Interface Unit của FOG.
- Chuyển đổi sang các chuẩn tín hiệu mà hệ thống repeater cũ yêu cầu (Step, Synchro, 6-steps, 360x, 720x, v.v.).
- Phân phối Heading tới nhiều nhánh khác nhau thông qua các terminal hoặc distributor tích hợp.
Trong một số trường hợp, các đèn báo lỗi hoặc alarm trên Control Unit cũ có thể nhấp nháy trong vài giờ sau khi khởi động lại do logic giám sát sensor cũ không còn khớp (ví dụ mất feedback từ gyro motor, tachometer, oil level…). Tuy nhiên, la bàn quang FOG vẫn xuất tín hiệu Heading chuẩn, ổn định, và các thiết bị dẫn đường như Radar, ECDIS, Autopilot vẫn hoạt động bình thường. Kỹ sư có thể:
- Vô hiệu hóa một số alarm không còn ý nghĩa (nếu được hãng hoặc Class cho phép).
- Hoặc chấp nhận trạng thái “alarm cosmetic” nhưng vẫn đảm bảo Heading output đạt chuẩn.
Ưu điểm kỹ thuật của Option 1:
- Chi phí thấp nhất trong các phương án, vì tận dụng tối đa Control Unit và repeater cũ.
- Thời gian thi công ngắn, thường chỉ cần vài giờ đến 1 ngày, phù hợp khi tàu chỉ neo ngắn hạn.
- Không phải đi lại toàn bộ cáp Heading tới các thiết bị khác, giảm rủi ro phát sinh lỗi do đấu nối mới.
Nhược điểm:
- Vẫn phụ thuộc vào độ tin cậy của Control Unit cũ; nếu Control Unit hỏng, hệ thống sẽ mất Heading dù FOG vẫn tốt.
- Không tận dụng hết các tính năng số hóa, đa cổng NMEA, Ethernet hoặc CANbus mà FOG hiện đại có thể cung cấp.
Option 2 & 3 – Lắp La Bàn Quang FOG Làm Hệ Thống Dự Phòng
Khi la bàn cơ học cũ vẫn còn hoạt động ổn định, nhiều chủ tàu, đặc biệt là tàu chở dầu, LNG, tàu khách, tàu offshore DP, lựa chọn lắp FOG như một hệ thống dự phòng (backup hoặc dual system) để tăng độ an toàn và đáp ứng yêu cầu redundancy của Class.
Cách làm tổng quát:
- Lắp đặt la bàn quang FOG song song với hệ thống gyro cơ hiện hữu, có thể đặt ở cùng deck hoặc tách biệt để giảm ảnh hưởng rung động và từ trường.
- Kết nối FOG tới một NMEA Selector Switch hoặc bộ chuyển mạch tín hiệu Heading (có thể là thiết bị chuyên dụng hoặc module switching tích hợp trong hệ thống phân phối Heading).
- Cấu hình Selector để có ít nhất hai nguồn Heading độc lập: Gyro cơ (Gyro 1) và FOG (Gyro 2 hoặc Gyro FOG).
- Người vận hành trên đài lái có thể chuyển đổi giữa tín hiệu từ la bàn cơ và FOG chỉ bằng thao tác gạt công tắc hoặc chọn nguồn trên panel điều khiển.
Trong thực tế, Option 2 và Option 3 thường khác nhau ở mức độ tích hợp:
- Option 2: FOG chỉ cấp Heading cho một số thiết bị quan trọng (ví dụ Radar số 2, ECDIS số 2, Autopilot backup), trong khi gyro cơ vẫn là nguồn Heading chính cho phần còn lại.
- Option 3: FOG được đưa vào mạng phân phối Heading trung tâm, có thể trở thành nguồn Heading chính khi gyro cơ gặp sự cố, với logic ưu tiên (priority) được thiết lập trong Selector hoặc trong hệ thống Integrated Navigation System (INS).
Cấu hình này giúp tàu luôn có ít nhất hai nguồn Heading độc lập, đáp ứng yêu cầu redundancy trong các tuyến vận tải quan trọng hoặc khu vực có mật độ giao thông dày đặc, cũng như trong các chế độ vận hành đặc biệt như DP (Dynamic Positioning), pilotage, narrow channel, ice navigation.
Một số điểm kỹ thuật cần lưu ý khi triển khai FOG làm hệ thống dự phòng:
- Đảm bảo đồng bộ tham chiếu Heading giữa gyro cơ và FOG (heading alignment, heading offset) để tránh chênh lệch lớn gây nhầm lẫn cho hoa tiêu và hệ thống tự động.
- Thiết lập giới hạn sai lệch cho phép (heading difference alarm) giữa hai nguồn Heading; nếu chênh lệch vượt ngưỡng, hệ thống sẽ cảnh báo để thuyền trưởng quyết định chọn nguồn tin cậy hơn.
- Kiểm tra khả năng xử lý của Autopilot khi chuyển nguồn Heading (ví dụ có cần reset, có bị mất chế độ track control, có yêu cầu heading jump compensation…).
- Đảm bảo Selector Switch hoặc bộ chuyển mạch có fail-safe mode, tránh trường hợp mất Heading hoàn toàn khi thiết bị chuyển mạch bị lỗi.
Ưu điểm:
- Tăng đáng kể độ an toàn hệ thống dẫn đường, đặc biệt trên các tàu yêu cầu redundancy cao.
- Cho phép so sánh, đánh giá độ ổn định và độ chính xác giữa gyro cơ và FOG trong thời gian dài trước khi quyết định loại bỏ hoàn toàn gyro cơ.
- Giảm rủi ro khi chuyển đổi công nghệ, vì luôn có nguồn Heading dự phòng.
Nhược điểm:
- Chi phí đầu tư và lắp đặt cao hơn Option 1 do phải bổ sung Selector, có thể thêm distributor, cáp tín hiệu mới.
- Cấu trúc hệ thống phức tạp hơn, đòi hỏi tài liệu sơ đồ Heading rõ ràng và đào tạo thuyền viên về cách chọn nguồn Heading đúng trong từng tình huống.
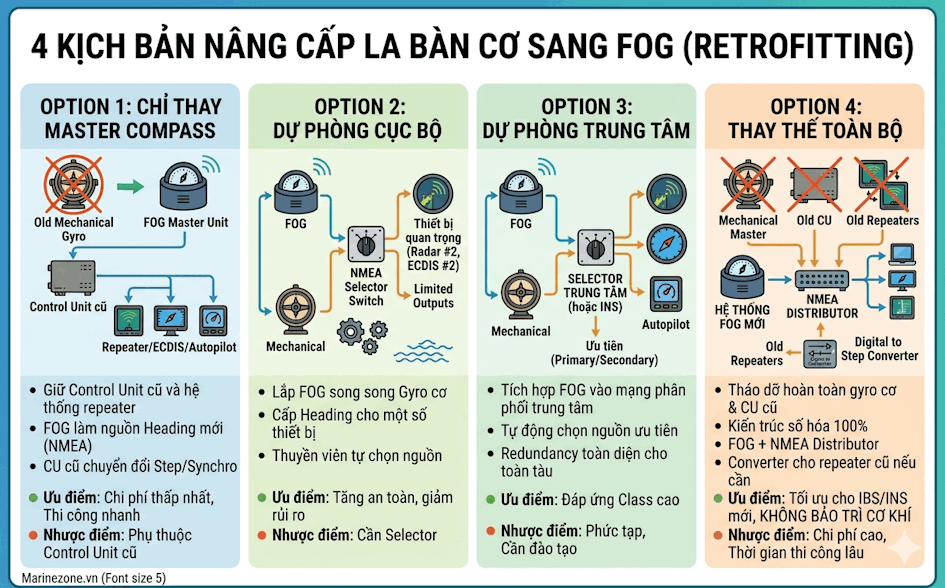
Option 4 – Thay Thế Toàn Bộ Hệ Thống Bằng La Bàn Quang FOG
Đây là phương án triệt để khi hệ thống gyro cơ cũ đã lỗi thời, khó sửa chữa, không còn phụ tùng thay thế, hoặc chi phí duy trì quá cao. Mục tiêu là xây dựng một kiến trúc dẫn đường số hóa hoàn toàn xoay quanh la bàn quang FOG, tận dụng tối đa các chuẩn giao tiếp hiện đại (NMEA, Ethernet, CAN, serial đa kênh).
Các bước chính thường bao gồm:
- Tháo dỡ toàn bộ gyro cơ học cũ, bao gồm sensor unit, Control Unit, các repeater chuyên dụng và các cáp tín hiệu không còn phù hợp hoặc đã xuống cấp.
- Lắp đặt la bàn quang FOG mới tại vị trí tối ưu (về độ cứng vững, rung động, nhiệt độ, khoảng cách tới nguồn nhiễu từ), kết nối tới NMEA distributor hoặc Heading Management Unit để phân phối tín hiệu Heading tới các thiết bị trên tàu.
- Thiết kế lại kiến trúc mạng Heading theo hướng tập trung hoặc phân tán, sử dụng nhiều cổng NMEA/RS-422 độc lập để giảm phụ thuộc vào một điểm lỗi duy nhất.
- Nếu tàu đang sử dụng Step signal repeaters hoặc Synchro repeaters cho các vị trí như steering stand, bridge wing, engine control room, cần bổ sung Digital to Step Converter hoặc Synchro Converter để chuyển đổi từ Heading số (NMEA) sang tín hiệu analog/step tương thích với repeater hiện hữu hoặc repeater mới.
- Thực hiện hiệu chuẩn (commissioning) toàn hệ thống: kiểm tra Heading trên từng repeater, so sánh với magnetic compass, GPS compass, radar overlay, đảm bảo sai số trong giới hạn cho phép của Class.
Phương án này cho phép tàu chuyển sang kiến trúc dẫn đường số hóa hoàn toàn, tối ưu cho các hệ thống Radar, ECDIS, DP và VDR thế hệ mới, đồng thời giảm thiểu chi phí bảo trì lâu dài nhờ:
- Loại bỏ các thành phần cơ khí quay, dầu, vòng bi, motor… vốn là nguồn gốc của hỏng hóc trong gyro cơ.
- Giảm nhu cầu hiệu chuẩn cơ khí, thay dầu, cân bằng rotor, kiểm tra leak oil.
- Tăng khả năng tích hợp với các hệ thống số hóa khác như Integrated Bridge System (IBS), Integrated Navigation System (INS), DP console, conning display.
Một số điểm kỹ thuật chuyên sâu cần cân nhắc khi chọn Option 4:
- Đảm bảo FOG đáp ứng đầy đủ các chuẩn IMO/IEC liên quan đến gyrocompass và heading control, cũng như được Class phê duyệt cho loại tàu tương ứng.
- Xem xét nhu cầu multi-FOG architecture (FOG 1, FOG 2) cho các tàu yêu cầu redundancy rất cao, kết hợp với Heading Management Unit để tự động chọn nguồn tốt nhất.
- Thiết kế sơ đồ cấp nguồn (power supply) với UPS hoặc nguồn dự phòng để đảm bảo FOG và NMEA distributor vẫn hoạt động trong trường hợp mất điện cục bộ.
- Lập tài liệu chi tiết (as-built drawing) cho toàn bộ mạng Heading mới để phục vụ bảo trì, kiểm tra Class và xử lý sự cố sau này.
Xử Lý Sai Số Môi Trường Trong La Bàn Quang FOG: Hiệu Ứng Shupe & AI
Mặc dù la bàn quang FOG miễn nhiễm với rung động cơ học và không chịu ảnh hưởng của các thành phần quay cơ khí như trong gyro cơ, nhưng hệ thống lại đặc biệt nhạy với biến thiên nhiệt độ không đồng nhất dọc theo cuộn sợi quang. Trong cấu trúc FOG, sợi quang được quấn thành nhiều lớp với chiều dài tổng cộng có thể lên tới vài trăm mét, do đó chỉ cần một gradient nhiệt nhỏ theo chiều dài cũng đủ tạo ra sai số đáng kể.
Hiệu ứng Shupe mô tả hiện tượng khi nhiệt độ thay đổi theo không gian và thời gian trên cuộn sợi, làm biến đổi chiết suất hiệu dụng và chiều dài quang học của từng đoạn sợi. Hai chùm sáng truyền theo hai hướng clockwise (CW) và counter-clockwise (CCW) sẽ trải nghiệm các lịch sử nhiệt khác nhau, dẫn đến sự khác biệt về pha không liên quan đến vận tốc quay thực. Thành phần pha dư này xuất hiện như một độ lệch pha giả, được bộ giải đoán của FOG hiểu nhầm là tín hiệu quay, gây ra bias drift (trôi điểm không) phụ thuộc nhiệt độ và lịch sử nhiệt.
Về mặt mô hình, pha do hiệu ứng Shupe có thể được biểu diễn như một tích phân theo chiều dài sợi của đạo hàm nhiệt độ theo thời gian nhân với hệ số nhạy cảm nhiệt của sợi. Điều này cho thấy không chỉ giá trị nhiệt độ tức thời, mà cả tốc độ thay đổi nhiệt độ và phân bố nhiệt theo không gian đều góp phần tạo nên sai số. Trong môi trường hàng hải, khi khoang thiết bị chịu tác động của nắng, gió biển, hệ thống điều hòa bật/tắt hoặc chuyển vùng khí hậu, gradient nhiệt có thể thay đổi nhanh, làm bias FOG trôi theo dạng phi tuyến, khó bù trừ bằng các mô hình tuyến tính đơn giản.
Các Giải Pháp Kỹ Thuật Giảm Thiểu Hiệu Ứng Shupe
Để đảm bảo la bàn quang FOG duy trì độ ổn định bias và độ chính xác heading trong dải nhiệt độ rộng, các nhà sản xuất kết hợp đồng thời các giải pháp về thiết kế cuộn sợi, kiến trúc đo và thuật toán xử lý tín hiệu.
- Quấn dây đối xứng (Symmetrical Winding):
- Sử dụng cấu trúc quấn quadrupole hoặc octupole cho cuộn sợi quang.
- Đảm bảo phân bố nhiệt tác động gần như đồng đều lên các phần đối xứng của cuộn sợi.
- Tự động triệt tiêu phần lớn thành phần sai số do gradient nhiệt.
Trong cấu trúc quấn thông thường (bipolar hoặc single-layer), mỗi vòng sợi ở các vị trí khác nhau trong cuộn sẽ chịu điều kiện nhiệt khác nhau, ví dụ: lớp ngoài gần vỏ housing nóng nhanh hơn lớp trong. Khi đó, chùm CW và CCW đi qua các đoạn sợi tại những thời điểm khác nhau, tích lũy pha Shupe không đối xứng.
Với quadrupole winding, sợi được quấn theo thứ tự vị trí sao cho mỗi đoạn sợi ở một bán kính nhất định sẽ được “ghép cặp” với một đoạn khác có điều kiện nhiệt tương đương nhưng hướng truyền quang ngược lại. Cách sắp xếp này làm cho đóng góp pha Shupe của các đoạn tương ứng gần như triệt tiêu lẫn nhau trong phép cộng tổng pha. Khi nâng lên cấu trúc octupole, số bậc đối xứng tăng, giúp giảm thêm các thành phần bậc cao của gradient nhiệt (ví dụ gradient phi tuyến theo bán kính hoặc theo chiều trục cuộn).
Thiết kế quấn đối xứng thường đi kèm với:
- Kiểm soát chặt chẽ lực căng sợi trong quá trình quấn để tránh ứng suất cơ học nội tại, vốn cũng có hệ số nhạy cảm nhiệt.
- Lựa chọn vật liệu bobbin có hệ số giãn nở nhiệt gần với sợi quang để giảm chênh lệch biến dạng khi nhiệt độ thay đổi.
- Tối ưu chiều cao và đường kính cuộn để giảm gradient nhiệt xuyên tâm và dọc trục.
Nhờ đó, ngay cả khi môi trường bên ngoài thay đổi nhanh, phân bố nhiệt hiệu dụng trong cuộn vẫn tương đối đối xứng, làm giảm đáng kể biên độ hiệu ứng Shupe trước khi cần đến các thuật toán bù trừ.
- Cấu trúc FOG vòng kín (Closed-loop FOG):
- Sử dụng vòng điều khiển để giữ pha giao thoa ở mức không đổi.
- Chuyển đổi độ lệch pha thành tín hiệu điều khiển dòng điện, từ đó suy ra vận tốc góc.
- Giảm đáng kể độ trôi và tăng dải động đo.
Trong FOG vòng hở, tín hiệu đầu ra là cường độ quang tại photodetector, phụ thuộc trực tiếp vào cos(Δφ), trong đó Δφ là tổng pha Sagnac cộng với các thành phần nhiễu như Shupe. Đặc tuyến cos phi tuyến và nhạy với nhiễu biên độ, nhiễu nguồn sáng, cũng như các biến thiên pha chậm do nhiệt.
Closed-loop FOG đưa vào một bộ điều khiển pha (phase modulator) trên sợi, tạo ra một pha bù Δφfb sao cho tổng pha tại điểm giao thoa được giữ gần 0 hoặc π/2 tùy cấu hình. Bộ điều khiển (thường là mạch servo trên DSP hoặc FPGA) điều chỉnh dòng điện hoặc điện áp điều khiển modulator để triệt tiêu sai lệch giữa tín hiệu đo và điểm làm việc mong muốn. Khi đó:
- Pha Sagnac do quay được “chuyển hóa” thành giá trị pha bù của vòng điều khiển.
- Đầu ra hệ thống là tín hiệu điện tỷ lệ với Δφfb, có quan hệ tuyến tính với vận tốc góc.
Cấu trúc vòng kín mang lại các lợi ích chuyên sâu:
- Tăng dải động: hệ thống có thể đo được vận tốc góc lớn hơn mà không bị bão hòa do đặc tuyến cos.
- Giảm nhạy với trôi biên độ: vì vòng điều khiển dựa trên pha, các biến thiên công suất nguồn sáng hoặc suy hao quang có ảnh hưởng nhỏ hơn.
- Lọc nhiễu thấp tần: bộ điều khiển có thể được thiết kế với đặc tính bù thích hợp để giảm tác động của các thành phần pha chậm, bao gồm một phần hiệu ứng Shupe có phổ tần thấp.
Khi kết hợp closed-loop với quấn đối xứng, phần pha Shupe còn lại sau khi triệt tiêu cơ học sẽ được “nhìn thấy” như một nhiễu chậm trong vòng điều khiển. Điều này tạo điều kiện thuận lợi cho các thuật toán số (bao gồm AI/ML) nhận dạng và bù trừ thêm trên miền thời gian.
- Bù trừ nhiệt bằng AI / Machine Learning:
- Tích hợp cảm biến nhiệt độ dọc theo cuộn sợi và trong module quang học.
- Sử dụng các thuật toán LSTM, BOA-GBDT hoặc mô hình học máy khác để mô hình hóa mối quan hệ giữa nhiệt độ, thời gian và sai số bias.
- Thực hiện bù trừ sai số động theo thời gian thực trên DSP hoặc FPGA, giúp la bàn quang FOG duy trì độ chính xác cao ngay cả khi khoang tàu chuyển từ môi trường lạnh sang nóng trong thời gian ngắn.
Hiệu ứng Shupe có bản chất phụ thuộc lịch sử (history-dependent): cùng một profile nhiệt độ tức thời nhưng với quá trình tăng/giảm khác nhau có thể tạo ra bias khác nhau. Các mô hình tuyến tính hoặc đa thức theo nhiệt độ thường không đủ để mô tả chính xác quan hệ này trong toàn dải hoạt động. Do đó, các mô hình học máy được khai thác để học trực tiếp ánh xạ:
- Chuỗi thời gian nhiệt độ tại nhiều điểm trên cuộn và trong housing.
- Thông tin trạng thái hệ thống (tốc độ quay ước lượng, mức tín hiệu, trạng thái servo).
- Bias đo được trong các thử nghiệm hiệu chuẩn có kiểm soát.
LSTM (Long Short-Term Memory) đặc biệt phù hợp vì có khả năng nắm bắt phụ thuộc dài hạn trong chuỗi thời gian, mô hình hóa được hiệu ứng tích lũy của gradient nhiệt theo thời gian. Mô hình LSTM có thể nhận đầu vào là vector nhiệt độ đa điểm trong một “cửa sổ thời gian” trượt và xuất ra ước lượng bias cần bù tại thời điểm hiện tại.
BOA-GBDT (Bayesian Optimization Algorithm – Gradient Boosting Decision Tree) được sử dụng để xây dựng mô hình phi tuyến mạnh với khả năng giải thích cao hơn. BOA tối ưu các siêu tham số của GBDT (số cây, độ sâu, learning rate, v.v.) để đạt sai số dự đoán bias tối thiểu trên tập dữ liệu hiệu chuẩn. Mô hình GBDT sau khi huấn luyện có thể được triển khai dưới dạng bảng tra hoặc tập các phương trình cây quyết định, rất phù hợp với tài nguyên hạn chế trên DSP/FPGA.
Quy trình triển khai bù trừ nhiệt dựa trên AI/ML trong la bàn quang FOG thường bao gồm:
- Thu thập dữ liệu trong buồng nhiệt theo các profile:
- Gia nhiệt/giảm nhiệt tuyến tính với nhiều tốc độ khác nhau.
- Chu kỳ nhiệt (thermal cycling) mô phỏng điều kiện ngày/đêm trên biển.
- Shock nhiệt nhanh mô phỏng chuyển vùng khí hậu.
- Gắn nhãn dữ liệu bằng cách:
- So sánh đầu ra FOG với chuẩn quay (rate table) có độ chính xác cao.
- Tách riêng thành phần bias do nhiệt bằng cách loại bỏ thành phần quay thực.
- Huấn luyện mô hình LSTM hoặc BOA-GBDT để dự đoán bias từ các đặc trưng nhiệt.
- Triển khai mô hình đã rút gọn trên DSP hoặc FPGA:
- Tiền xử lý: lọc nhiễu cảm biến nhiệt, nội suy nếu mất mẫu.
- Suy luận mô hình: tính bias ước lượng theo thời gian thực.
- Bù trừ: trừ bias ước lượng khỏi tín hiệu quay đo được trước khi xuất ra heading.
Nhờ cách tiếp cận này, la bàn quang FOG có thể duy trì sai số heading trong giới hạn yêu cầu của các tiêu chuẩn IEC/ISO và IMO ngay cả khi hệ thống trải qua các kịch bản nhiệt khắc nghiệt, ví dụ: tàu rời vùng nước lạnh đi vào vùng nhiệt đới trong thời gian ngắn, hoặc khi hệ thống điều hòa trên tàu thay đổi chế độ đột ngột.
Sự kết hợp giữa thiết kế quang học – cơ học (quấn đối xứng, vật liệu bobbin, cách nhiệt housing), kiến trúc đo vòng kín và các thuật toán bù trừ dựa trên AI/Machine Learning tạo nên thế hệ la bàn quang FOG có độ ổn định bias cao, dải nhiệt độ hoạt động rộng và khả năng đáp ứng các bài test môi trường khắc nghiệt theo chuẩn hàng hải quốc tế.
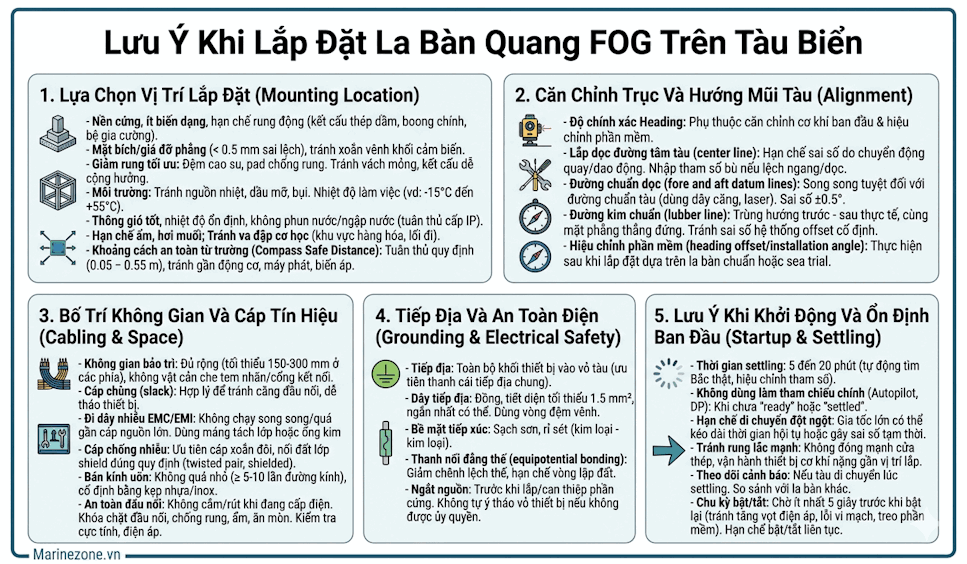
Lưu Ý Khi Lắp Đặt La Bàn Quang FOG Trên Tàu Biển
Để la bàn quang FOG phát huy tối đa hiệu năng, việc lắp đặt đúng kỹ thuật là yếu tố then chốt. Các yêu cầu về vị trí, căn chỉnh, cáp tín hiệu và an toàn điện cần được tuân thủ nghiêm ngặt theo hướng dẫn của nhà sản xuất, chuẩn đăng kiểm (VR, NK, DNV, ABS…) và các quy phạm an toàn hàng hải hiện hành. Ngoài ra, cần xem xét đến điều kiện khai thác thực tế của từng con tàu (tàu hàng, tàu dịch vụ, tàu cao tốc, tàu cá xa bờ…) để tối ưu hóa cấu hình lắp đặt.
Lựa Chọn Vị Trí Lắp Đặt (Mounting Location)
Vị trí lắp đặt Compass Unit của la bàn quang FOG phải đáp ứng đồng thời các tiêu chí cơ học, môi trường và tương thích với các thiết bị hàng hải khác trên tàu.
- Môi trường cơ học:
- Nền lắp đặt phải có độ cứng cao, ít biến dạng, hạn chế rung động; ưu tiên các kết cấu thép dầm ngang/dọc, boong chính hoặc bệ thiết bị đã được gia cường.
- Mặt bích hoặc giá đỡ nên được gia công phẳng, sai lệch độ phẳng nhỏ (thường < 0.5 mm trên toàn bộ bề mặt tiếp xúc) để tránh xoắn vênh khối cảm biến.
- Dù FOG chịu sốc tốt, việc giảm rung vẫn giúp tối ưu hóa độ chính xác và tuổi thọ; có thể sử dụng thêm đệm cao su kỹ thuật hoặc pad chống rung theo khuyến cáo của nhà sản xuất.
- Tránh lắp trực tiếp lên vách mỏng, tấm che hoặc các kết cấu dễ cộng hưởng với tần số rung của máy chính, chân vịt, bow thruster.
- Môi trường xung quanh:
- Tránh gần nguồn nhiệt, ống xả, lỗ thông hơi nóng, khu vực nhiều dầu mỡ, bụi bẩn; nhiệt độ môi trường nên nằm trong dải làm việc được công bố (ví dụ: -15°C đến +55°C).
- Đảm bảo khu vực lắp đặt được thông gió tốt, nhiệt độ ổn định, không bị phun nước trực tiếp hoặc ngập nước; nếu lắp ngoài trời phải tuân thủ đúng cấp bảo vệ IP của thiết bị.
- Hạn chế lắp đặt tại vị trí có độ ẩm cao, hơi muối đậm đặc mà không có biện pháp che chắn, vì có thể gây ăn mòn đầu nối, giá đỡ và điểm tiếp địa.
- Tránh khu vực có khả năng va đập cơ học (khu vực bốc dỡ hàng, lối đi hẹp, nơi đặt dụng cụ) để giảm nguy cơ hư hỏng do tác động bên ngoài.
- Khoảng cách an toàn từ trường (Compass Safe Distance):
- Dù la bàn quang FOG không bị ảnh hưởng bởi từ trường, nhưng nó có thể gây nhiễu cho la bàn từ trên tàu, đặc biệt khi trong FOG có các phần tử điện tử, nguồn xung, cuộn dây.
- Cần tuân thủ khoảng cách an toàn được nhà sản xuất quy định (thường 0.05 m đến 0.55 m tùy khối thiết bị); khoảng cách này thường được ghi rõ trong “Compass Safe Distance Table” của từng model.
- Màn hình hiển thị và khối xử lý của FOG cũng nên đặt cách xa động cơ, máy phát điện, biến áp, tủ khởi động động cơ và các nguồn từ trường mạnh khác để tránh gây sai số cho la bàn từ và các cảm biến từ trường khác.
- Khi bố trí trong phòng lái, cần kiểm tra thực tế bằng la bàn cầm tay (nếu được yêu cầu) để xác nhận khoảng cách an toàn với la bàn từ chuẩn (standard magnetic compass).
Căn Chỉnh Trục Và Hướng Mũi Tàu (Alignment)
Độ chính xác Heading của la bàn quang FOG phụ thuộc rất lớn vào việc căn chỉnh cơ khí ban đầu và hiệu chỉnh phần mềm. Sai số nhỏ trong căn chỉnh có thể tạo ra sai số hệ thống cố định, ảnh hưởng đến autopilot, ECDIS, radar overlay và các hệ thống DP (Dynamic Positioning).
- Lắp dọc theo đường tâm tàu (center line):
- Khối cảm biến nên được đặt càng gần đường tâm tàu càng tốt để giảm ảnh hưởng của chuyển động quay quanh trục dọc và trục ngang của thân tàu.
- Trong trường hợp không thể đặt đúng đường tâm, cần ghi nhận chính xác khoảng lệch ngang (athwartship offset) và dọc (fore-aft offset) để nhập vào tham số bù trong hệ thống điều khiển hoặc ECDIS.
- Giảm sai số do chuyển động quay và dao động thân tàu, đặc biệt quan trọng với tàu cao tốc, tàu dịch vụ dầu khí, tàu hoạt động trong điều kiện sóng gió lớn.
- Đường chuẩn dọc (fore and aft datum lines):
- Đường chuẩn trên la bàn mẹ và các repeater phải song song tuyệt đối với đường chuẩn dọc thân tàu; nên sử dụng dây căng, laser hoặc các điểm mốc đóng trên boong để xác định chính xác.
- Sai số cho phép thường trong khoảng ±0.5°, tuy nhiên với các hệ thống yêu cầu độ chính xác cao (DP class 2/3) nên cố gắng đạt sai số nhỏ hơn.
- Khi khoan lỗ hoặc bắt bulông cố định, cần kiểm tra lại góc lệch bằng thước đo góc hoặc thiết bị đo laser để tránh xoay lệch khối cảm biến.
- Đường kim chuẩn (lubber line):
- Phải nằm trên cùng một mặt phẳng thẳng đứng đi qua tâm đĩa la bàn hoặc tâm khối cảm biến, đảm bảo trùng với hướng trước – sau thực tế của tàu.
- Được căn chỉnh chính xác theo hướng trước – sau của tàu để tránh sai số hệ thống; mọi sai lệch sẽ xuất hiện như một sai số offset cố định trên tất cả các repeater và thiết bị nhận heading.
- Sau khi căn chỉnh cơ khí, cần thực hiện thêm bước hiệu chỉnh phần mềm (heading offset/installation angle) nếu nhà sản xuất cho phép, dựa trên so sánh với la bàn chuẩn hoặc kết quả chạy thử sea trial.
Bố Trí Không Gian Và Cáp Tín Hiệu (Cabling & Space)
Hệ thống la bàn quang FOG thường bao gồm Compass Unit, Interface Unit và Display Unit. Việc bố trí không gian và đi dây phải đảm bảo vừa đáp ứng yêu cầu kỹ thuật, vừa thuận tiện cho vận hành, bảo trì, đồng thời tuân thủ các chuẩn EMC/EMI trên tàu.
- Không gian bảo trì:
- Để lại khoảng trống đủ rộng quanh thiết bị để thao tác đấu nối, kiểm tra, thay thế; tối thiểu nên có khoảng hở 150–300 mm ở các phía có đầu nối hoặc nắp bảo trì.
- Chừa một đoạn cáp chùng (slack) hợp lý để tránh căng kéo đầu nối, đồng thời cho phép tháo thiết bị ra khỏi giá đỡ mà không phải tháo toàn bộ cáp.
- Tránh bố trí vật cản cố định (ống, máng cáp, khung đỡ khác) che khuất tem nhãn, nhãn hiệu chuẩn hoặc cổng kết nối quan trọng.
- Nguyên tắc đi dây:
- Không chạy cáp tín hiệu FOG song song hoặc quá gần cáp nguồn công suất lớn, cáp khởi động động cơ, cáp biến tần để hạn chế nhiễu điện từ; nếu bắt buộc phải đi chung máng, nên tách lớp hoặc dùng ống kim loại bọc riêng.
- Ưu tiên sử dụng cáp xoắn đôi chống nhiễu (twisted pair, shielded) cho tín hiệu NMEA, Ethernet, synchro/step, và nối đất lớp shield đúng một đầu theo hướng dẫn của nhà sản xuất.
- Tránh uốn cong cáp với bán kính quá nhỏ gây hỏng lõi hoặc suy hao tín hiệu; không bẻ gập cáp tại điểm vào đầu nối.
- Tuân thủ bán kính uốn tối thiểu do nhà sản xuất cáp quy định (thường ≥ 5–10 lần đường kính cáp), cố định cáp bằng kẹp nhựa hoặc kẹp inox chống ăn mòn, khoảng cách kẹp hợp lý để tránh võng.
- An toàn đấu nối:
- Không cắm/rút đầu nối khi hệ thống đang được cấp điện để tránh phóng điện, hư hỏng chân cắm hoặc gây reset hệ thống.
- Đảm bảo đầu nối được khóa chặt, chống rung, chống ẩm, chống ăn mòn; sử dụng đúng loại connector, đúng chuẩn IP và siết lực theo khuyến cáo.
- Kiểm tra cực tính nguồn, điện áp cung cấp (ví dụ 24 VDC) và cực tính tín hiệu trước khi đấu; nên dùng nhãn đánh dấu (ferrule, tag) cho từng lõi cáp để thuận tiện cho bảo trì.
Tiếp Địa Và An Toàn Điện (Grounding & Electrical Safety)
Để bảo vệ la bàn quang FOG khỏi các sự cố điện, xung sét lan truyền và đảm bảo an toàn cho thuyền viên, cần tuân thủ các nguyên tắc tiếp địa và bảo vệ quá áp, quá dòng theo đúng tiêu chuẩn điện tàu biển.
- Tất cả các khối Compass Unit, Interface Unit, Display Unit phải được tiếp địa đúng chuẩn vào vỏ tàu, ưu tiên sử dụng thanh cái tiếp địa chung trong phòng lái hoặc phòng thiết bị.
- Sử dụng dây đồng tiếp địa có tiết diện tối thiểu 1.5 mm², với chiều dài ngắn nhất có thể; với các tuyến cáp dài hoặc khu vực nhiễu cao, có thể tăng tiết diện theo khuyến cáo.
- Khi bắt vít tiếp địa, phải dùng vòng đệm vênh (spring washer) và đai ốc để tránh lỏng do rung lắc; bề mặt tiếp xúc phải được làm sạch sơn, rỉ sét để đảm bảo tiếp xúc kim loại – kim loại tốt.
- Cân nhắc sử dụng thêm thanh nối đẳng thế (equipotential bonding) giữa các tủ thiết bị hàng hải (radar, ECDIS, autopilot, FOG) để giảm chênh lệch thế, hạn chế vòng lặp đất (ground loop).
- Trước khi lắp đặt hoặc can thiệp phần cứng, phải ngắt nguồn điện tại bảng phân phối chính, treo biển cảnh báo và xác nhận không còn điện áp dư trên đường dây.
- Không tự ý tháo vỏ thiết bị nếu không phải là nhân sự được ủy quyền hoặc đã được đào tạo; việc mở vỏ có thể làm mất bảo hành, mất khả năng chống nước và gây nguy hiểm điện giật.
Lưu Ý Khi Khởi Động Và Ổn Định Ban Đầu (Startup & Settling)
Trong quá trình khởi động la bàn quang FOG, cần tuân thủ một số lưu ý để đảm bảo hệ thống hội tụ chính xác, giảm thiểu sai số ban đầu và đảm bảo dữ liệu heading ổn định cho các hệ thống điều hướng liên quan.
- Thời gian settling:
- Thường từ 5 đến 20 phút tùy dòng sản phẩm, cấu hình cảm biến và điều kiện môi trường (nhiệt độ, độ rung, chuyển động tàu).
- Trong thời gian này, FOG đang tự động tìm hướng Bắc thật, hiệu chỉnh các tham số quán tính, bù trôi (bias) của gyro và tối ưu bộ lọc số (digital filter).
- Không nên sử dụng heading FOG làm nguồn tham chiếu chính cho autopilot hoặc DP trong giai đoạn hệ thống chưa báo trạng thái “ready” hoặc “settled”.
- Hạn chế di chuyển:
- Không di chuyển khối la bàn hoặc tàu một cách đột ngột trong giai đoạn settling; các gia tốc lớn, quay vòng gấp có thể kéo dài thời gian hội tụ hoặc gây sai số tạm thời.
- Tránh các thao tác gây rung lắc mạnh gần vị trí lắp đặt như đóng mạnh cửa thép, vận hành thiết bị cơ khí nặng ngay sát khu vực đặt Compass Unit.
- Nếu tàu bắt buộc phải di chuyển trong giai đoạn này (ví dụ rời cảng gấp), cần theo dõi cảnh báo trên Display Unit và so sánh heading FOG với la bàn từ hoặc gyro khác để phát hiện sai lệch bất thường.
- Chu kỳ bật/tắt:
- Sau khi tắt FOG, nên chờ ít nhất 5 giây trước khi bật lại để tụ điện xả hết và mạch nguồn trở về trạng thái ổn định.
- Giúp tránh hiện tượng tăng vọt điện áp và lỗi vi mạch trong khối nguồn, đồng thời giảm nguy cơ treo phần mềm do reset quá nhanh.
- Hạn chế thao tác bật/tắt liên tục trong thời gian ngắn; với nhiều hệ thống, việc duy trì cấp nguồn liên tục trong suốt hành trình sẽ cho độ ổn định heading tốt hơn do thuật toán bù trôi được duy trì.
Lưu Ý Khi Lựa Chọn La Bàn Quang FOG Cho Tàu Biển
Việc lựa chọn đúng la bàn quang FOG cho tàu biển là một quyết định mang tính kỹ thuật và pháp lý, không chỉ dừng ở yếu tố giá thành hay thương hiệu. Người thiết kế, chủ tàu và đơn vị tích hợp hệ thống (system integrator) cần đánh giá đồng thời các khía cạnh: chứng nhận pháp lý quốc tế, độ chính xác và độ ổn định dài hạn, khả năng đo chuyển động 3D (3D motion), tính tương thích khi retrofitting, tính ITAR-free, cũng như đặc tính môi trường và thời gian khởi động. Mỗi tiêu chí đều ảnh hưởng trực tiếp đến an toàn hàng hải, khả năng khai thác thiết bị và chi phí vòng đời (life-cycle cost) của hệ thống định hướng trên tàu.
Chứng Nhận Hàng Hải Quốc Tế (IMO, MED Wheelmark, Đăng Kiểm)
Đối với tàu thương mại, tàu dịch vụ ngoài khơi, tàu khách, việc sử dụng la bàn quang FOG đạt chuẩn là yêu cầu bắt buộc để được cấp giấy chứng nhận an toàn và đủ điều kiện khai thác. Một hệ thống FOG chỉ thực sự “đi biển” được khi đáp ứng đồng thời các tiêu chuẩn chức năng, an toàn điện – điện tử và được các tổ chức đăng kiểm công nhận.
- IMO A.424(XI) – Quy định về gyrocompass dùng cho tàu biển:
- Xác định các yêu cầu về độ chính xác heading, độ ổn định, khả năng duy trì hoạt động trong điều kiện mất nguồn tạm thời.
- Quy định các thử nghiệm về rung, sốc, nhiễu điện từ (EMC) và ảnh hưởng từ trường.
- FOG được chứng nhận theo A.424(XI) có thể thay thế trực tiếp gyro cơ trong hầu hết các ứng dụng thương mại.
- IMO A.694(17) – Yêu cầu chung cho thiết bị và hệ thống điện tử hàng hải:
- Đề cập đến độ tin cậy, tính sẵn sàng, khả năng tự giám sát (self-monitoring) và báo lỗi.
- Yêu cầu về giao diện người – máy (HMI), cảnh báo, và tích hợp với các hệ thống khác trên tàu.
- IMO A.821(19) – Yêu cầu bổ sung cho tàu cao tốc (HSC):
- Đòi hỏi đáp ứng tốt hơn với gia tốc lớn, chuyển động nhanh, góc lắc lớn.
- FOG dùng cho HSC thường phải có băng thông động học (dynamic range) và tốc độ cập nhật dữ liệu cao hơn.
- ISO 8728:2024 – Tiêu chuẩn về tính năng và giao diện hiển thị gyrocompass:
- Quy định cách trình bày heading, đơn vị đo, độ phân giải, và các tham số cấu hình.
- Đảm bảo tính nhất quán khi FOG kết nối với radar, ECDIS, autopilot từ nhiều nhà sản xuất khác nhau.
- ISO 16328:2014 – Tiêu chuẩn cho hệ thống tham chiếu hướng và gyrocompass:
- Định nghĩa các thuật ngữ như heading reference, heading sensor, heading management system.
- Đưa ra các bài test về độ chính xác, độ trôi theo thời gian, và khả năng chịu nhiễu.
- MED Module B/D – Wheelmark do các tổ chức đăng kiểm như DNV cấp:
- Chứng nhận theo Công ước Thiết bị Hàng hải (Marine Equipment Directive) cho tàu mang cờ EU.
- Dấu Wheelmark thể hiện thiết bị đã qua đánh giá thiết kế (Module B) và giám sát sản xuất (Module D).
Bên cạnh đó, nhiều chủ tàu còn yêu cầu thiết bị phải được chấp thuận bởi các đăng kiểm quốc gia hoặc khu vực như VR, ABS, LR, BV, tùy theo cờ tàu và tuyến hoạt động. Khi đánh giá, cần kiểm tra rõ:
- Thiết bị được type approved cho loại tàu nào (cargo, tanker, passenger, HSC, offshore).
- Giới hạn hoạt động về nhiệt độ, độ cao, vùng địa từ (cao vĩ độ) được ghi trong chứng chỉ.
- Phiên bản phần mềm/hardware cụ thể có nằm trong phạm vi chứng nhận hay không.
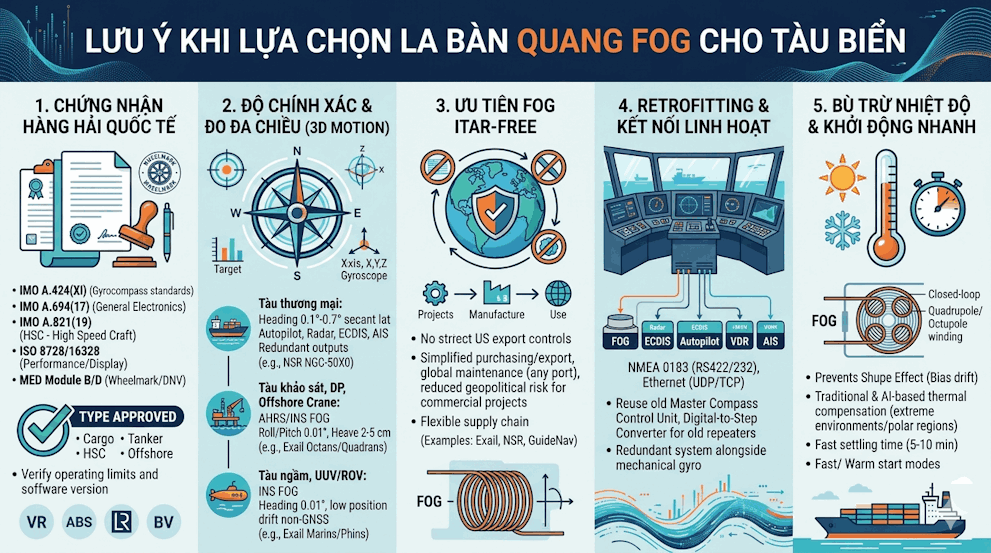
Độ Chính Xác Heading Và Tính Năng Đo Đa Chiều (3D Motion)
Độ chính xác của la bàn quang FOG không chỉ là con số heading error trên catalogue mà còn liên quan đến điều kiện thử nghiệm (sea trial, bench test), chế độ hoạt động (stand-alone hay kết hợp GNSS, log) và thuật toán lọc. Việc xác định đúng nhu cầu kỹ thuật giúp tối ưu chi phí đầu tư mà vẫn đảm bảo an toàn và hiệu quả vận hành.
- Tàu thương mại mặt nước:
- Độ chính xác Heading yêu cầu thường từ 0.1° đến 0.7° secant latitude, đủ cho:
- Điều khiển tự động (autopilot) tuyến đường dài.
- Tích hợp với radar, ECDIS để hiển thị và ghi log hành trình.
- Hỗ trợ AIS, VDR, và các hệ thống giám sát từ bờ.
- FOG chuẩn IMO như NSR NGC-50X0 thường:
- Có 2–3 đầu ra heading độc lập (redundant outputs) để cấp cho nhiều hệ thống.
- Hỗ trợ chế độ dual gyro hoặc multi-sensor voting để tăng độ tin cậy.
- Cung cấp heading ổn định ngay cả khi tàu quay vòng hoặc chịu sóng lớn.
- Độ chính xác Heading yêu cầu thường từ 0.1° đến 0.7° secant latitude, đủ cho:
- Tàu khảo sát thủy đạc, tàu DP, tàu cần cẩu ngoài khơi:
- Cần AHRS/INS FOG cung cấp đầy đủ Heading, Roll, Pitch, Heave với:
- Độ chính xác Roll/Pitch có thể yêu cầu tới 0.01° để:
- Hiệu chỉnh dữ liệu sonar, multibeam, sub-bottom profiler.
- Đảm bảo độ chính xác vị trí đầu cần cẩu, ROV, hoặc thiết bị hạ thủy.
- Heave cần độ chính xác khoảng 2–5 cm hoặc 2–5% tùy chiều cao sóng:
- Quan trọng cho bù trừ chuyển động khi khảo sát địa hình đáy biển.
- Giảm sai số khi định vị giàn khoan, cáp ngầm, ống dẫn.
- Độ chính xác Roll/Pitch có thể yêu cầu tới 0.01° để:
- Các dòng như Exail Octans, Quadrans là lựa chọn điển hình:
- Tích hợp cảm biến gia tốc, con quay quang học và thuật toán INS/AHRS chuyên dụng.
- Hỗ trợ nhiều frame tham chiếu (vessel frame, sensor frame, survey frame) để dễ dàng tích hợp.
- Có thể xuất dữ liệu với tần số cao (50–200 Hz) cho hệ thống DP và survey.
- Cần AHRS/INS FOG cung cấp đầy đủ Heading, Roll, Pitch, Heave với:
- Tàu ngầm, UUV/ROV, tàu quân sự chiến lược:
- Cần INS FOG với sai số Heading cỡ 0.01° hoặc tốt hơn:
- Đảm bảo khả năng điều hướng chính xác trong môi trường không có GNSS.
- Giảm sai số tích lũy khi chạy lâu trong chế độ dead-reckoning.
- Độ trôi vị trí chỉ 1 hải lý sau hàng trăm giờ hoạt động không GNSS:
- Đòi hỏi con quay FOG có độ ổn định bias cực thấp và hệ thống hiệu chuẩn sâu.
- Thường kết hợp với DVL, pressure sensor, LBL/USBL để tối ưu quỹ đạo.
- Các dòng như Exail Marins, Phins được thiết kế cho phân khúc này:
- Hỗ trợ nhiều chế độ căn chỉnh (alignment) như quay vòng, chạy thẳng, hoặc căn chỉnh tại bến.
- Có giao diện quân sự, hỗ trợ chuẩn dữ liệu đặc thù và cơ chế bảo mật cao.
- Cần INS FOG với sai số Heading cỡ 0.01° hoặc tốt hơn:
Ưu Tiên Các Hệ Thống La Bàn Quang FOG ITAR-Free
Nhiều hệ thống FOG độ chính xác cao do các hãng Mỹ sản xuất bị xếp vào danh mục ITAR (International Traffic in Arms Regulations), chịu kiểm soát xuất khẩu vũ khí. Điều này không chỉ ảnh hưởng đến khâu mua sắm mà còn tác động đến toàn bộ vòng đời vận hành của thiết bị.
- Thủ tục mua bán, xuất nhập khẩu phức tạp:
- Cần giấy phép xuất khẩu đặc biệt, thời gian phê duyệt kéo dài.
- Có thể bị từ chối cấp phép nếu tàu hoạt động tại khu vực nhạy cảm hoặc thuộc quốc gia bị hạn chế.
- Hạn chế khu vực có thể cung cấp dịch vụ bảo trì, sửa chữa:
- Thiết bị ITAR có thể không được phép gửi ra khỏi một số quốc gia để sửa chữa.
- Chi phí logistics và thời gian dừng tàu tăng đáng kể khi phải gửi về nhà sản xuất.
- Nguy cơ bị ảnh hưởng bởi các lệnh trừng phạt hoặc cấm vận:
- Dự án có thể bị đình trệ nếu chính sách xuất khẩu thay đổi đột ngột.
- Khó đảm bảo nguồn phụ tùng thay thế trong dài hạn.
Đối với tàu thương mại và dự án dân sự, việc lựa chọn la bàn quang FOG ITAR-free như các dòng của Exail, NSR, GuideNav giúp:
- Dễ dàng mua sắm, thay thế, nâng cấp tại bất kỳ cảng biển nào:
- Không cần xin giấy phép xuất khẩu đặc biệt cho mỗi lần giao hàng.
- Có thể lựa chọn nhà phân phối khu vực, rút ngắn thời gian giao thiết bị.
- Giảm rủi ro pháp lý liên quan đến kiểm soát vũ khí:
- Tránh bị xếp dự án vào nhóm nhạy cảm về quốc phòng.
- Thuận lợi hơn trong việc huy động vốn, bảo hiểm và đăng kiểm.
- Đảm bảo chuỗi cung ứng linh hoạt, không phụ thuộc vào một quốc gia duy nhất:
- Có thể chuyển đổi nhà cung cấp dịch vụ bảo trì mà không vướng rào cản ITAR.
- Giảm nguy cơ gián đoạn hoạt động do biến động địa chính trị.
Tính Linh Hoạt Khi Retrofitting Và Kết Nối Đài Lái
Một la bàn quang FOG phù hợp cho tàu hiện hữu cần hỗ trợ đa dạng giao diện kết nối và cấu hình lắp đặt, nhằm giảm thiểu chi phí cải hoán (retrofit) và thời gian dừng tàu. Khả năng tương thích ngược với hạ tầng cũ là yếu tố then chốt khi thay thế gyro cơ hoặc hệ thống heading đã lỗi thời.
- Giao diện tín hiệu:
- Nhiều cổng NMEA 0183 qua RS422/RS232:
- Cho phép cấp heading đồng thời cho radar, ECDIS, autopilot, VDR, AIS.
- Có thể cấu hình tốc độ baud, câu lệnh (HDG, HDT, THS, ATT) và tần suất phát.
- Hỗ trợ Ethernet (UDP/TCP) cho Radar, ECDIS, DP hiện đại:
- Đáp ứng xu hướng số hóa, giảm phụ thuộc vào cáp serial truyền thống.
- Cho phép tích hợp vào mạng LAN hàng hải, hỗ trợ giao thức riêng của nhà sản xuất radar/DP.
- Khả năng nhận dữ liệu GNSS (RMC, GGA) và Speed Log (VBW) để bù trừ vận tốc:
- Cải thiện độ ổn định heading khi tàu chạy tốc độ thấp hoặc đứng yên.
- Hỗ trợ chế độ INS lai (hybrid) để tăng độ tin cậy trong điều kiện GNSS không ổn định.
- Nhiều cổng NMEA 0183 qua RS422/RS232:
- Khả năng tận dụng hạ tầng cũ:
- Cho phép chỉ thay master compass và kết nối vào Control Unit cũ:
- Giảm chi phí thay thế repeater, cáp, tủ điều khiển.
- Giữ nguyên bố trí trên đài lái, hạn chế phải đào tạo lại thuyền viên.
- Hỗ trợ Digital to Step Converter để dùng lại repeater Step signal:
- Chuyển đổi heading số (NMEA, Ethernet) sang tín hiệu step/analog cho repeater cũ.
- Đặc biệt hữu ích trên tàu già, nơi hệ thống repeater cơ khí vẫn còn tốt.
- Có thể cấu hình FOG làm hệ thống dự phòng song song với gyro cơ:
- Tăng tính sẵn sàng: khi gyro cơ hỏng, FOG có thể tiếp quản ngay.
- Cho phép so sánh chéo (cross-check) giữa hai nguồn heading để phát hiện sai lệch.
Khả Năng Bù Trừ Nhiệt Độ Và Thời Gian Khởi Động Nhanh
Trong môi trường biển, nhiệt độ thay đổi liên tục giữa ngày và đêm, giữa các vùng khí hậu, gây ra Hiệu ứng Shupe nếu FOG không được thiết kế tốt. Hiệu ứng này làm thay đổi đặc tính sợi quang theo nhiệt độ, dẫn đến trôi bias và sai số heading. Vì vậy, cấu trúc cảm biến và thuật toán bù nhiệt là yếu tố quan trọng khi đánh giá chất lượng la bàn quang FOG.
- Cấu trúc Closed-loop FOG với quấn dây đối xứng (quadrupole, octupole):
- Closed-loop FOG sử dụng vòng điều khiển để giữ pha giao thoa ở mức tối ưu, giảm nhạy cảm với nhiễu và trôi.
- Cấu trúc quấn dây đối xứng (quadrupole, octupole) giúp triệt tiêu các gradient nhiệt dọc theo sợi quang.
- Nhờ đó, độ ổn định bias được cải thiện đáng kể trong dải nhiệt độ rộng trên tàu.
- Tích hợp thuật toán bù nhiệt hoặc AI-based thermal compensation:
- Cảm biến nhiệt độ đặt tại nhiều vị trí trên cuộn sợi và mạch quang để đo chính xác phân bố nhiệt.
- Thuật toán bù nhiệt cổ điển sử dụng mô hình toán học của FOG để hiệu chỉnh bias theo nhiệt độ.
- Các giải pháp AI-based thermal compensation học từ dữ liệu vận hành thực tế, cho phép:
- Nhận diện các mẫu trôi phi tuyến do chu kỳ ngày – đêm, chế độ vận hành máy chính.
- Cải thiện độ ổn định heading trong điều kiện môi trường khắc nghiệt, đặc biệt ở vùng cực.
- Thời gian khởi động nhanh, settling time 5–10 phút cho các ứng dụng cần phản ứng nhanh:
- Settling time là thời gian từ lúc bật nguồn đến khi heading đạt độ chính xác danh định.
- Đối với tàu dịch vụ ngoài khơi, tàu tuần tra, tàu khảo sát, thời gian khởi động ngắn giúp:
- Giảm thời gian chờ trước khi rời cảng hoặc bắt đầu chiến dịch khảo sát.
- Tăng tính linh hoạt khi phải tắt/bật thiết bị do bảo trì hoặc chuyển đổi nguồn.
- Các hệ thống FOG hiện đại thường có chế độ fast start hoặc warm start:
- Lưu lại trạng thái căn chỉnh trước đó để rút ngắn thời gian hội tụ.
- Tự động chuyển sang chế độ chính xác cao hơn khi đủ dữ liệu tích lũy.
Câu Hỏi Thường Gặp (FAQs) Về La Bàn Quang FOG Hàng Hải
Trong quá trình tư vấn, thiết kế, lắp đặt, hiệu chuẩn và vận hành la bàn quang FOG trên tàu biển, có một số câu hỏi được đặt ra thường xuyên từ chủ tàu, sỹ quan boong, kỹ sư máy và đơn vị đăng kiểm. Hiểu rõ các vấn đề này giúp chủ tàu và thuyền viên không chỉ khai thác tối ưu hệ thống FOG mà còn lập kế hoạch bảo trì, nâng cấp, đáp ứng yêu cầu IMO, SOLAS, IEC và các quy phạm của đăng kiểm (VR, DNV, ABS, LR…).
FOG Có Cần Bảo Dưỡng Hàng Năm Như La Bàn Cơ Học Không?
Không cần bảo dưỡng cơ khí định kỳ. Với thiết kế 100% trạng thái rắn (solid-state), sử dụng sợi quang và cảm biến quán tính không có chi tiết quay, không có ổ trục, không có bánh đà, la bàn quang FOG loại bỏ hoàn toàn các hạng mục bảo dưỡng cơ học bắt buộc như:
- Thay dầu, kiểm tra mức dầu, xử lý rò rỉ dầu của gyro cơ học.
- Kiểm tra, cân chỉnh, thay thế ổ bi, cụm rotor, motor đồng bộ.
- Hiệu chỉnh cơ khí do mài mòn, rung động lâu dài.
Thay vào đó, công việc bảo trì tập trung vào phần điện – điện tử và môi trường lắp đặt:
- Đảm bảo nguồn cấp AC/DC ổn định, nằm trong dải điện áp cho phép, kiểm tra định kỳ cầu chì, MCB, terminal.
- Kiểm tra kết nối cáp tín hiệu (NMEA, Ethernet, Step, synchro) tránh oxy hóa, lỏng chân, nhiễu điện từ.
- Đảm bảo môi trường lắp đặt khối cảm biến (Sensor Unit) khô ráo, thông thoáng, tránh nước mặn, hơi dầu, nhiệt độ và độ ẩm vượt giới hạn nhà sản xuất.
- Cập nhật firmware khi nhà sản xuất khuyến nghị để sửa lỗi, cải thiện thuật toán lọc và tích hợp với thiết bị mới.
Nhờ đó, chi phí vận hành vòng đời (Life Cycle Cost) của FOG thấp hơn đáng kể so với gyro cơ học: không cần dừng tàu để đại tu gyro, không cần dự trữ nhiều phụ tùng cơ khí, giảm rủi ro hỏng đột xuất do kẹt ổ trục hoặc vỡ rotor. Trong thực tế, nhiều hệ thống FOG hoạt động ổn định 8–10 năm chỉ với các kiểm tra định kỳ đơn giản theo lịch bảo trì của tàu.
Thời Gian Ổn Định (Settling Time) Của FOG Là Bao Lâu? Cần Lưu Ý Gì Khi Bật Máy?
Thời gian ổn định của la bàn quang FOG – tức thời gian từ lúc cấp nguồn đến khi hệ thống cho phép sử dụng Heading với độ chính xác danh định – thường nằm trong khoảng 5 đến 20 phút tùy dòng sản phẩm, cấu hình và điều kiện lắp đặt.
Một số ví dụ điển hình:
- Exail Octans: thời gian ổn định nhanh, khoảng 5 phút trong điều kiện tàu đứng yên hoặc chuyển động đều, phù hợp cho tàu dịch vụ ngoài khơi, DP, survey.
- NSR NGC-50X0: thời gian ổn định điển hình 10–20 phút, đổi lại khả năng lọc nhiễu tốt, độ trôi thấp, thích hợp cho tàu thương mại, tàu công trình.
Trong giai đoạn này, hệ thống đang:
- Tự động tìm hướng Bắc thật dựa trên chuyển động quay của Trái Đất (Earth rate) và mô hình trọng lực.
- Khởi tạo và hội tụ bộ lọc Kalman hoặc các thuật toán lọc tương đương, kết hợp dữ liệu từ gyroscope quang, accelerometer, GNSS, log tốc độ.
- Ước lượng và bù trừ các sai số hệ thống như bias, scale factor, misalignment giữa các trục cảm biến.
Các lưu ý quan trọng khi bật máy:
- Không di chuyển tàu hoặc khối cảm biến đột ngột trong giai đoạn khởi tạo. Tàu nên ở trạng thái neo, cài DP, hoặc chạy ổn định với tốc độ và hướng tương đối không đổi.
- Tránh thao tác cơ khí mạnh lên khu vực lắp đặt FOG (đập, khoan, hàn) trong lúc hệ thống đang settling.
- Đảm bảo nguồn GNSS và log tốc độ (nếu được dùng trong cấu hình INS) đã sẵn sàng, giúp bộ lọc hội tụ nhanh hơn và chính xác hơn.
- Theo dõi trạng thái trên Control Unit hoặc giao diện web/serial: các trạng thái như “Aligning”, “Settling”, “Valid heading” cho biết khi nào có thể chuyển nguồn heading sang FOG cho radar, ECDIS, autopilot.
Nếu trong quá trình settling xảy ra rung lắc mạnh, quay vòng gấp hoặc mất nguồn, hệ thống có thể kéo dài thời gian ổn định hoặc phải khởi tạo lại. Một số model cho phép chế độ fast restart khi mất nguồn trong thời gian ngắn, tận dụng dữ liệu hiệu chuẩn trước đó để rút ngắn thời gian hội tụ.
Có Thể Dùng Lại Màn Hình Repeater Cũ Khi Thay Master Compass Bằng FOG Không?
Có thể, với điều kiện tương thích giao thức tín hiệu. Hầu hết la bàn quang FOG chuẩn hàng hải đều hỗ trợ nhiều cổng NMEA 0183 (RS422/RS232), dễ dàng kết nối với các repeater số hiện đại, autopilot, radar, ECDIS.
Đối với các tàu cũ đang sử dụng repeater Step signal hoặc synchro/servo analog, giải pháp phổ biến là bổ sung Digital to Step Converter hoặc Digital to Synchro Converter. Bộ chuyển đổi này nhận dữ liệu heading dạng số (NMEA HDT/THS) từ FOG và xuất ra:
- Tín hiệu Step 24/35/90 V theo chuẩn repeater hiện hữu.
- Hoặc tín hiệu synchro với điện áp và tần số phù hợp.
Nhờ đó có thể:
- Tận dụng 100% hệ thống cáp, repeater trên buồng lái, cánh lái, phòng điều khiển máy.
- Giảm đáng kể chi phí nhân công kéo cáp mới xuyên boong, xuyên vách.
- Hạn chế can thiệp vào kết cấu tàu, không ảnh hưởng đến chứng chỉ đăng kiểm hiện có.
Khi thiết kế giải pháp, cần kiểm tra kỹ:
- Điện áp, tần số, số bước của repeater Step hiện hữu.
- Dòng tiêu thụ tối đa để chọn bộ converter có công suất phù hợp.
- Vị trí lắp converter (thường gần Control Unit hoặc trong gyro room cũ) để tối ưu chiều dài cáp.
ITAR-Free Là Gì Và Vì Sao Chủ Tàu Thương Mại Cần Quan Tâm?
ITAR (International Traffic in Arms Regulations) là bộ quy định kiểm soát xuất khẩu vũ khí và công nghệ lưỡng dụng của Hoa Kỳ. Nhiều loại FOG độ chính xác cao do Mỹ sản xuất được xếp vào danh mục này, dẫn đến:
- Thủ tục cấp phép xuất – nhập khẩu phức tạp, thời gian chờ dài.
- Hạn chế cung cấp cho một số quốc gia hoặc vùng lãnh thổ nằm trong danh sách trừng phạt.
- Khó khăn khi gửi thiết bị đi bảo hành, sửa chữa, hoặc chuyển nhượng tàu kèm thiết bị.
Khi lựa chọn la bàn quang FOG ITAR-free (như các sản phẩm từ Exail, NSR, GuideNav), chủ tàu thương mại được hưởng các lợi ích quan trọng:
- Tự do mua sắm, thay thế, bảo hành tại nhiều quốc gia mà không vướng rào cản kiểm soát vũ khí.
- Giảm rủi ro liên quan đến lệnh cấm vận, thay đổi chính sách xuất khẩu, hoặc xung đột địa chính trị.
- Đảm bảo tính liên tục của hoạt động khai thác tàu trên toàn cầu, đặc biệt với đội tàu hoạt động đa quốc gia, đa cờ.
- Dễ dàng chuyển giao thiết bị khi bán tàu, chuyển cờ, hoặc cho thuê tàu dài hạn.
Đối với các dự án dầu khí, điện gió ngoài khơi, survey quốc tế, yêu cầu ITAR-free thường được ghi rõ trong technical specification để tránh rủi ro pháp lý và chậm tiến độ do thủ tục xuất nhập khẩu thiết bị.
Có Thể Nâng Cấp La Bàn Cơ Học Cũ Sang FOG Mà Không Chạy Lại Toàn Bộ Cáp Không?
Có thể trong đa số trường hợp. Quá trình retrofitting la bàn quang FOG được các hãng thiết kế rất linh hoạt, nhằm tận dụng tối đa hạ tầng cũ và giảm thời gian tàu phải dừng.
Quy trình điển hình:
- Tháo bỏ master compass cơ bị hỏng hoặc đã hết vòng đời, giữ lại gyro stand, gyro room nếu còn phù hợp.
- Lắp Sensor Unit của FOG tại vị trí gần trọng tâm quay của tàu (thường gần LCG/TCG), có thể là vị trí gyro cũ hoặc khu vực lân cận ít rung, ít nhiễu từ.
- Kết nối Interface Unit/Control Unit của FOG vào Control Unit cũ hoặc trực tiếp vào mạng heading của tàu (NMEA bus, Step bus).
- Giữ nguyên repeater và cáp tín hiệu hiện hữu, chỉ thay đổi nguồn heading đầu vào.
- Bổ sung Digital to Step Converter hoặc module synchro nếu cần tương thích với repeater Step/synchro đời cũ.
Các điểm kỹ thuật cần lưu ý:
- Đảm bảo độ thẳng hàng (alignment) giữa trục dọc tàu và trục tham chiếu của FOG; sai lệch này sẽ được nhập vào hệ thống như một giá trị offset.
- Kiểm tra độ suy hao cáp hiện hữu, đặc biệt với đường Step dài, để tránh sụt áp gây sai số góc trên repeater xa.
- Thực hiện sea trial sau khi retrofit: so sánh heading FOG với magnetic compass, GNSS compass, kiểm tra hoạt động của radar, ECDIS, autopilot ở các chế độ chạy thẳng, quay vòng, chạy lùi.
Ngoài Heading, La Bàn Quang FOG Còn Cung Cấp Những Dữ Liệu Nào?
Các hệ thống la bàn quang FOG hàng hải hiện đại thực chất là một dạng Inertial Navigation System (INS) hoặc Motion Reference Unit (MRU), không chỉ cung cấp Heading mà còn nhiều tham số động học quan trọng:
- Roll / Pitch – Độ nghiêng ngang và dọc thân tàu, thường với độ chính xác đến 0,01–0,05°, phục vụ:
- Ổn định anten VSAT, TVRO, radar.
- Bù nghiêng cho sonar, multibeam, USBL.
- Giám sát an toàn khi tàu hoạt động trong điều kiện sóng gió lớn.
- Heave / Surge / Sway – Chuyển động tịnh tiến 3 trục:
- Heave: chuyển động lên xuống theo phương thẳng đứng.
- Surge: chuyển động dọc theo trục mũi – lái.
- Sway: chuyển động ngang mạn trái – mạn phải.
- Rate of Turn (ROT) – Tốc độ quay mũi tàu, thường tính bằng °/min, dùng cho:
- Radar (hiển thị ROT, hỗ trợ ARPA, TT).
- Autopilot (điều khiển quay vòng mượt, tránh quá lái).
- Giám sát tuân thủ quy định COLREG khi đổi hướng.
Công nghệ Smart Heave hoặc các thuật toán heave tiên tiến cho phép đo chuyển động nhồi với độ chính xác tới 2 cm hoặc 2% (tùy điều kiện sóng và cấu hình), đáp ứng các ứng dụng yêu cầu cao như:
- Khảo sát thủy đạc, địa chấn, multibeam: bù heave chính xác để nâng cao chất lượng dữ liệu độ sâu, mặt cắt địa chất.
- Vận hành cần cẩu ngoài khơi: heave compensation cho active heave crane, giảm tải động lên kết cấu và hàng hóa.
- Hệ thống định vị động (DP): cung cấp dữ liệu attitude và motion ổn định cho DP controller, kết hợp với GNSS, taut wire, USBL.
La Bàn Quang FOG Giao Tiếp Với Radar, ECDIS, Autopilot Bằng Chuẩn Nào?
Các la bàn quang FOG chuẩn IMO thế hệ mới được thiết kế để tích hợp linh hoạt với hầu hết thiết bị hàng hải hiện đại, thông qua:
- NMEA 0183 qua nhiều cổng RS232/RS422:
- Cho phép kết nối song song đến radar, ECDIS, autopilot, VDR, AIS, conning display.
- Có thể cấu hình tốc độ baud, tần số phát bản tin, lựa chọn câu lệnh xuất.
- Ethernet (UDP/TCP client/server):
- Phù hợp với các hệ thống số hóa, mạng IP trên tàu, integrated bridge system (IBS).
- Hỗ trợ nhiều phiên kết nối đồng thời, dễ dàng phân phối dữ liệu heading/motion đến nhiều thiết bị.
Hệ thống FOG sẽ phát các câu lệnh chuẩn như:
- HDT – True Heading: heading so với Bắc thật, là nguồn chính cho radar, ECDIS, autopilot.
- ROT – Rate of Turn: tốc độ quay mũi tàu, dùng cho hiển thị và điều khiển quay vòng.
- THS – True Heading and Status: heading kèm trạng thái chất lượng, cho phép thiết bị nhận biết khi heading không còn trong giới hạn IMO.
Đồng thời, FOG có thể nhận dữ liệu từ:
- GNSS (RMC, GGA): cung cấp vị trí, tốc độ, hướng chuyển động (COG), hỗ trợ thuật toán INS hybrid.
- Speed Log (VBW): cung cấp tốc độ dọc/trên nước, giúp bù trừ sai số vận tốc và cải thiện độ chính xác heading trong một số chế độ.
Việc cấu hình đúng nguồn vào/ra, ưu tiên nguồn heading, và giám sát cảnh báo trên radar/ECDIS là phần quan trọng trong quá trình nghiệm thu hệ thống dẫn đường theo chuẩn IMO.
FOG Xử Lý Thế Nào Khi Mất GNSS Hoặc Mất Nguồn AC?
La bàn quang FOG là cảm biến quán tính độc lập, hoạt động dựa trên nguyên lý giao thoa sợi quang và đo tốc độ quay, nên khi mất tín hiệu GNSS, hệ thống vẫn tiếp tục cung cấp Heading, Roll, Pitch, ROT và các dữ liệu tư thế tàu mà không bị gián đoạn. Tuy nhiên, để đảm bảo an toàn và tuân thủ IMO, FOG sẽ:
- Gửi cảnh báo "Loss of position" hoặc tương đương qua hệ thống BAM (Bridge Alert Management) và các cổng NMEA/Ethernet khi mất GNSS, giúp sỹ quan boong nhận biết rằng hệ thống đang chạy ở chế độ quán tính thuần.
- Trong cấu hình INS, độ chính xác vị trí sẽ giảm dần theo thời gian do trôi quán tính; tuy nhiên heading và attitude vẫn duy trì trong giới hạn cho phép trong một khoảng thời gian dài.
Khi mất nguồn AC chính cấp cho hệ thống FOG:
- FOG phát cảnh báo "AC Power fail" qua BAM, NMEA, relay contact để kích hoạt báo động âm thanh/ánh sáng trên buồng lái.
- Nếu được cấu hình, hệ thống sẽ tự động chuyển sang nguồn DC dự phòng 24V (từ UPS, battery bus hoặc emergency switchboard), đảm bảo các chức năng dẫn đường cốt lõi (heading, ROT, attitude) luôn sẵn sàng.
- Trong một số cấu hình, Control Unit và Sensor Unit có thể được cấp nguồn từ hai nguồn độc lập (AC và DC), tăng khả năng chịu lỗi.
Việc thiết kế hệ thống điện cho FOG nên tuân thủ nguyên tắc:
- Kết nối nguồn chính từ main switchboard và nguồn dự phòng từ emergency switchboard/UPS.
- Giám sát dòng, áp, và tình trạng chuyển nguồn để tránh reset không mong muốn.
- Kiểm tra định kỳ chức năng chuyển nguồn và cảnh báo để đảm bảo hệ thống hoạt động đúng trong tình huống khẩn cấp.
Cảm ơn bạn đã đọc bài dài tới đây !
Bạn có thể tìm hiểu thêm thông tin sản phẩm cụ thể model NGC-5050 tại đây
Nếu cần hỗ trợ thêm thông tin, hãy liên hệ với chúng tôi theo :
Thông tin liên hệ và kết nối
MarineZone
Địa chỉ: Số 144, tổ 6, phường Phú Diễn, Hà Nội
Điện thoại/Zalo: 0865.085.436
Website: marinezone.vn
Các mạng xã hội chính thức:










.png)




