







Trong kỷ nguyên hàng hải hiện đại, việc xác định chính xác tốc độ và quãng đường di chuyển của tàu không chỉ là vấn đề hiệu quả kinh tế mà còn là yếu tố sống còn cho an toàn sinh mạng trên biển. Cho dù bạn là một thuyền trưởng đang điều động tàu cập cảng, một nhà máy đóng tàu đang tìm kiếm giải pháp trang bị cho tàu đóng mới, hay một kỹ sư Nav & Comm đang đau đầu với các bệnh của thiết bị, bài viết này sẽ là cẩm nang giải quyết vấn đề của bạn về Máy đo tốc độ (Speed Log).
1. Máy Đo Tốc Độ Tàu Biển (Speed Log) Là Gì? Lịch Sử & Phân Loại
Máy đo tốc độ tàu biển (Speed Log), hay còn được gọi chính thức là Thiết bị đo tốc độ và quãng đường (Speed and Distance Measuring Equipment - SDME), là một thiết bị hàng hải chuyên dụng dùng để đo lường tốc độ di chuyển của tàu và ghi nhận tổng quãng đường mà tàu đã đi qua. Đơn vị tiêu chuẩn được sử dụng để biểu thị tốc độ của tàu là "Knot" (nút - tương đương 1 hải lý/giờ).
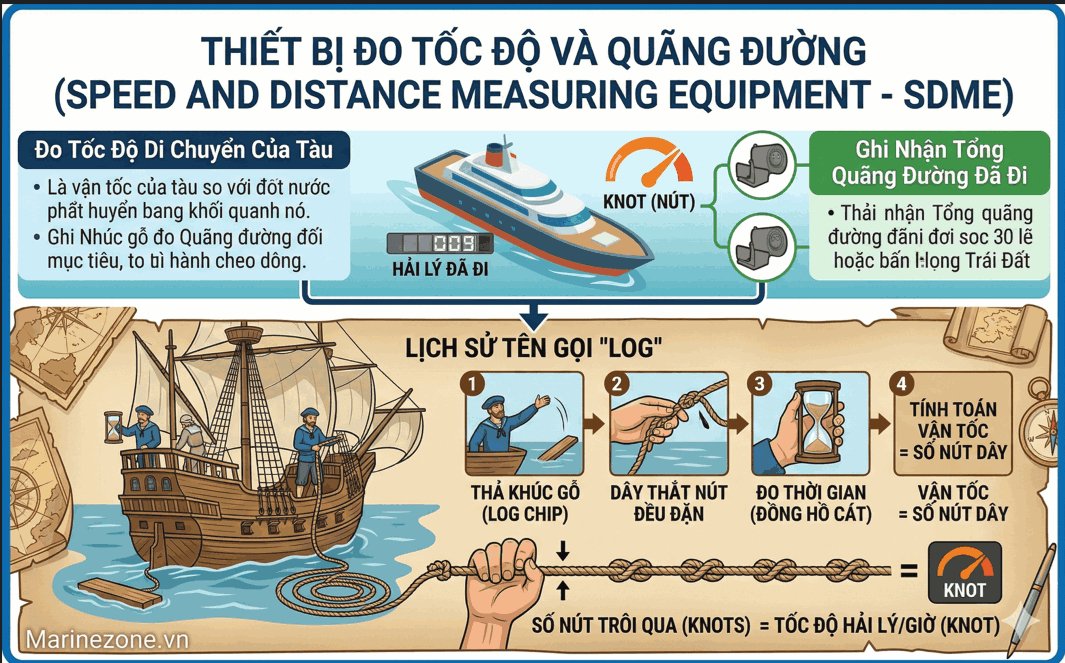
Tên gọi "Log" (nghĩa đen là khúc gỗ) bắt nguồn từ lịch sử hàng hải vào khoảng thế kỷ 16. Khi đó, các thủy thủ sử dụng một tấm gỗ (được buộc vào một sợi dây có thắt nút đều đặn) thả xuống nước phía sau đuôi tàu.
Bằng cách đếm số nút dây trôi qua tay trong một khoảng thời gian nhất định (đo bằng đồng hồ cát), họ có thể tính toán được vận tốc của tàu chính là cơ sở hình thành nên đơn vị "Knot" (Hải lý/giờ) ngày nay.

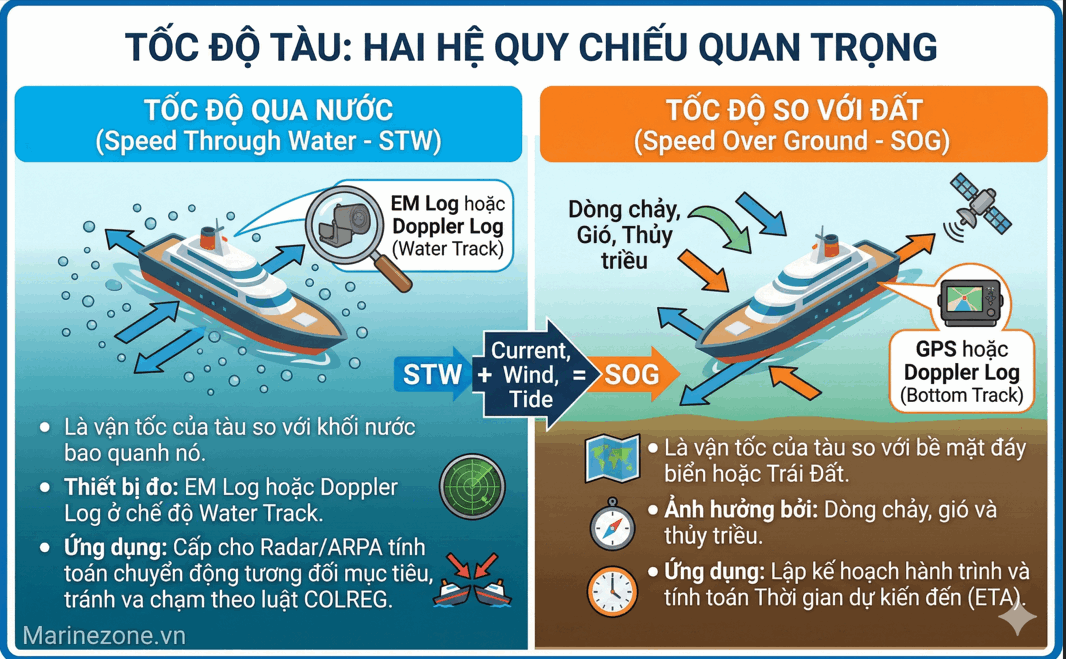
Trong hàng hải hiện đại, tốc độ tàu được chia làm hai hệ quy chiếu quan trọng nhất:
Tốc độ qua nước (Speed Through Water - STW): Là vận tốc của tàu so với khối nước bao quanh nó. Thiết bị đo STW thường là EM Log hoặc Doppler Log ở chế độ Water Track. STW là thông số bắt buộc phải cấp cho hệ thống Radar/ARPA để tính toán chuyển động tương đối của các mục tiêu, hỗ trợ tránh va chạm theo luật COLREG .
Tốc độ so với đất (Speed Over Ground - SOG): Là vận tốc của tàu so với bề mặt đáy biển hoặc Trái Đất. SOG bị ảnh hưởng bởi dòng chảy, gió và thủy triều. SOG thường được đo bằng GPS hoặc Doppler Log ở chế độ Bottom Track. SOG rất quan trọng để lập kế hoạch hành trình và tính toán Thời gian dự kiến đến (ETA).
2. Tại Sao Tàu Phải Lắp Đặt Speed Log? (Quy Định SOLAS & IMO)
Việc trang bị thiết bị đo tốc độ không phải là tùy chọn, mà là bắt buộc theo luật hàng hải quốc tế.Theo Quy định 19.2.3.4 và 19.2.9.2 của Chương V Công ước SOLAS:
Tàu từ 300 GT trở lên và mọi tàu khách: Phải được trang bị thiết bị đo tốc độ và quãng đường di chuyển qua nước (STW).
Tàu từ 50.000 GT trở lên: Phải được trang bị thêm một thiết bị đo tốc độ và quãng đường so với đất (SOG) theo cả hướng dọc (tiến/lùi) và hướng ngang tàu (athwartships).
Đặc biệt lưu ý cho các kỹ sư & chủ tàu: Ủy ban An toàn Hàng hải (IMO MSC) đã làm rõ trong nghị quyết MSC.334(90) và thông tư MSC.1/Circ.1429 rằng đối với các tàu từ 50.000 GT trở lên, yêu cầu này phải được đáp ứng bằng 02 ( hai) thiết bị riêng biệt (một cho STW và một cho SOG) để đảm bảo tính dự phòng.
Tiêu chuẩn hiệu suất kỹ thuật (MSC.96(72) & A.824(19))
Để được phê duyệt, thiết bị phải đáp ứng:
Độ chính xác: Sai số không vượt quá 2% vận tốc tàu hoặc 0.2 knots (chọn giá trị lớn hơn) đối với màn hình kỹ thuật số.
Độ sâu: Hoạt động chính xác khi mực nước dưới lườn tàu sâu hơn 3 mét đối với đo STW, và sâu hơn 2 mét đối với đo SOG.
Điều kiện biển: Vẫn duy trì độ chính xác khi tàu lắc ngang (roll) đến ±10° và lắc dọc (pitch) đến ±5°.
3. Phân Tích Chuyên Sâu Các Công Nghệ Speed Log Hiện Nay
Hiện nay có 3 loại máy đo tốc độ chính:
3.1. Máy đo tốc độ Doppler (Doppler Speed Log)
Đây là thiết bị tiên tiến nhất, thường trang bị trên các tàu lớn vì khả năng đo cả SOG và STW, độ chính xác cao và đo được tốc độ ngang (Athwartship).
Nguyên lý: Dựa trên Hiệu ứng Doppler. Đầu dò (Transducer) phát ra chùm sóng siêu âm (thường từ 100 kHz đến 1 MHz) nghiêng một góc 60 độ so với vỏ tàu. Sự chênh lệch tần số giữa sóng phát đi (f_t) và sóng dội lại (f_r) chính là tần số Doppler (f_d). Tốc độ tàu V được tính theo công thức: fd=c2⋅V⋅ft⋅cosθ (trong đó c là vận tốc âm thanh).
Janus Configuration (Cấu hình Janus): Để triệt tiêu sai số do tàu lắc dọc (pitch) hay nhồi sóng (heave), hệ thống sử dụng 2 chùm tia đối xứng hướng về mũi và lái. Bất kỳ sai số tăng tần số ở phía trước sẽ bị triệt tiêu bởi sai số giảm tần số ở phía sau.
Chế độ Tracking:
Bottom Track (Đo SOG): Sóng siêu âm dội lại từ đáy biển, đo SOG chính xác, thường hiệu quả ở độ sâu lên đến 200m.
Water Track (Đo STW): Ở độ sâu lớn hơn, sóng dội lại từ các lớp hạt lơ lửng/sinh vật phù du ở độ sâu khoảng 10-30 mét dưới lườn tàu.
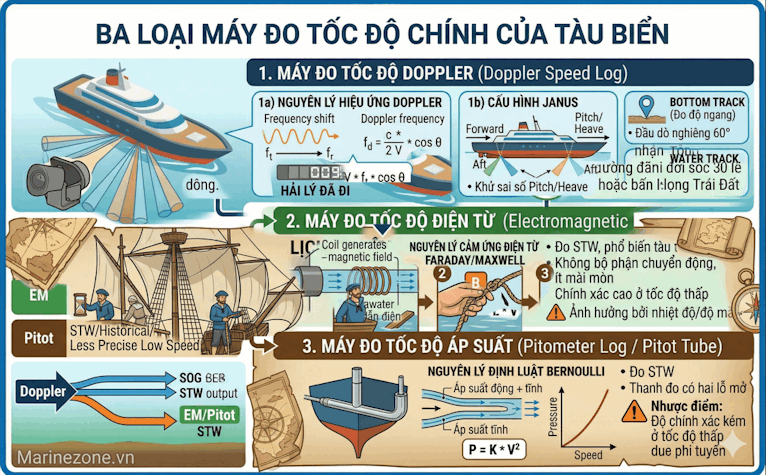
3.2. Máy đo tốc độ Điện từ (Electromagnetic Log - EM Log)
Rất phổ biến để đo STW trên tàu thương mại do không có bộ phận chuyển động, ít bị mài mòn.
Nguyên lý: Dựa trên định luật cảm ứng điện từ Faraday/Maxwell. Một cuộn dây điện từ tạo ra từ trường ổn định xung quanh đầu dò. Khi tàu chạy, nước biển (đóng vai trò là vật dẫn điện) cắt ngang các đường sức từ, tạo ra một suất điện động (e.m.f) tỷ lệ thuận với vận tốc tàu: e.m.f=B⋅L⋅V.
Ưu điểm: Cực kỳ chính xác ngay cả ở tốc độ thấp, thiết kế nhỏ gọn. Tuy nhiên, vì nước biển là vật dẫn, độ chính xác có thể bị ảnh hưởng bởi nhiệt độ và độ mặn.
3.3. Máy đo tốc độ Áp suất (Pitometer Log / Pitot Tube)
Dựa trên định luật Bernoulli. Thanh đo có hai lỗ mở: một lỗ hướng về mũi nhận cả áp suất động và tĩnh, một lỗ hướng ngang chỉ nhận áp suất tĩnh. Độ chênh lệch (áp suất động) sẽ tỷ lệ thuận với bình phương vận tốc (). Nhược điểm lớn nhất là độ chính xác kém ở tốc độ thấp do tính chất phi tuyến tính.
4. Hướng Dẫn Lắp Đặt (Installation)
Việc lắp đặt Transducer quyết định 90% độ chính xác của hệ thống. Một lỗi nhỏ trong thi công có thể khiến thiết bị nhiễu hoàn toàn.
Vị trí lắp đặt lý tưởng:
Phải cách xa mũi tàu, thường ở khoảng 1/3 chiều dài tàu (LWL) tính từ mũi để đón được dòng chảy tầng (laminar flow).
Cách xa transducer của máy đo sâu (Echo Sounder) ít nhất 2.5 mét để tránh nhiễu chéo.
Tránh xa các nguồn tạo bọt khí (Aeration): Không lắp gần chân vịt mũi (Bow thruster), đường ống xả nước, hay các vị trí phía sau gờ lồi của vỏ tàu. Bọt khí sẽ làm suy hao sóng âm của Doppler và phá vỡ từ trường của EM Log.
Phương pháp lắp đặt:
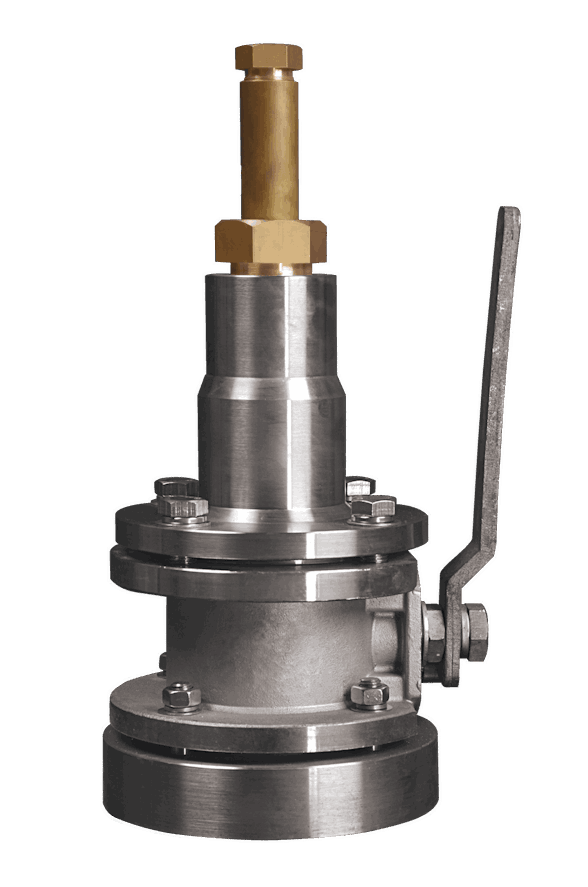
Lắp đặt với Gate Valve (Van Cổng): Là giải pháp hoàn hảo cho các chủ tàu vì cho phép kỹ sư Nav & Comm có thể rút/thay thế Transducer ngay cả khi tàu đang nổi trên mặt nước (không cần đưa tàu lên đà).
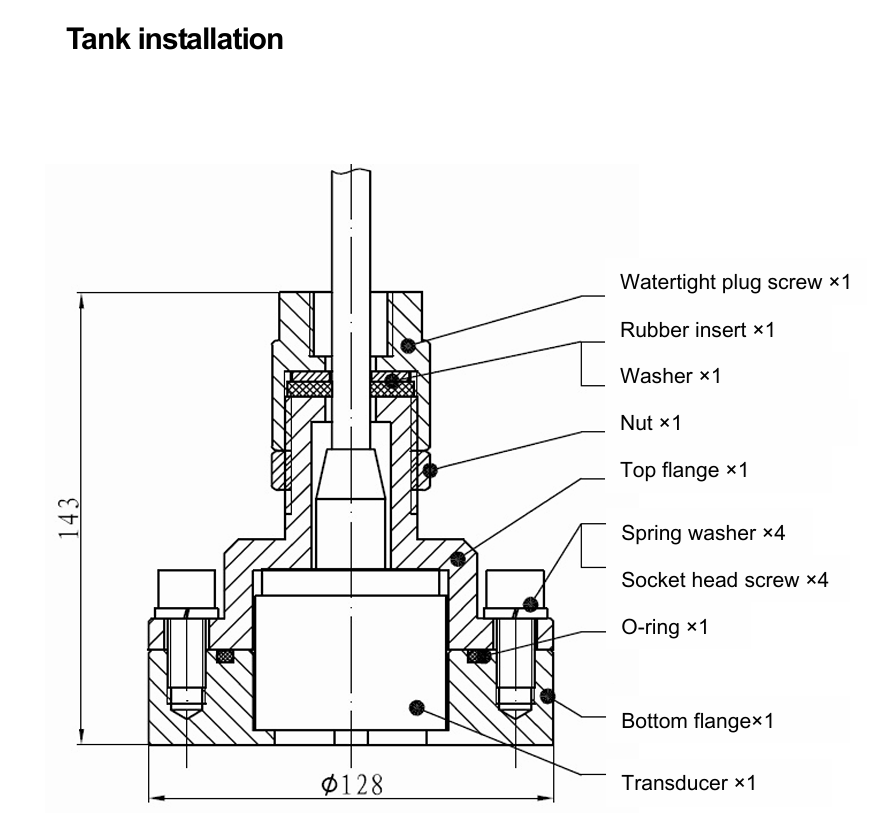
2. Lắp đặt dạng Tank (Khoang/Giếng): Giải pháp an toàn, tiết kiệm chi phí, nhưng phải dùng kết hợp mặt bích, có nhược điểm là thường chỉ thay được đầu dò khi tàu lên ụ (dry dock). Lưu ý thi công: Góc lệch của đường kính Transducer so với đường tâm dọc tàu (center fore-aft line) phải dưới 5 độ hoặc lý tưởng là 1 độ.

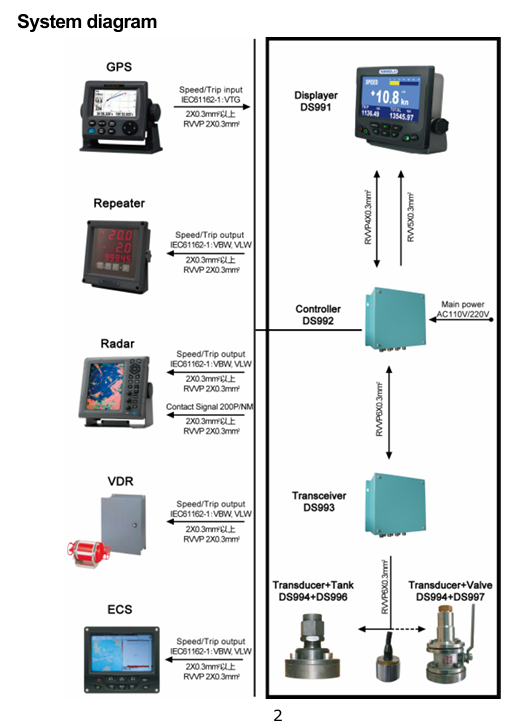
5. Giao Tiếp Dữ Liệu NMEA 0183 & Tích Hợp Hệ Thống
Speed Log là "trái tim" dữ liệu cho các hệ thống: Radar/ARPA, ECDIS, AIS, VDR, và Auto Pilot. Giao tiếp thường qua chuẩn IEC 61162-1 (NMEA 0183) ở tốc độ baud 4800 hoặc 38400 (HS).
Các câu lệnh (Sentences) quan trọng nhất:
$--VBW (Dual Ground/Water Speed): Chứa vận tốc dọc/ngang so với nước và vận tốc dọc/ngang so với đất cùng trạng thái tín hiệu.
$--VLW (Distance Traveled through Water): Chứa dữ liệu quãng đường tổng (Total) và quãng đường Trip chạy qua nước hoặc so với đất.
$--VTG (Course Over Ground & Ground Speed): Hướng và tốc độ so với đất do GPS xuất ra (đôi khi được đưa vào Speed Log để tham chiếu).
$--VHW (Water Speed & Heading): Cung cấp tốc độ qua nước và hướng mũi tàu.
6. Khắc Phục Sự Cố (Troubleshooting) Dành Cho Kỹ Sư
Khi Speed Log trục trặc, hãy tiếp cận theo sơ đồ sau:
6.1. Màn hình báo "No Speed" / "No Data" / Nhấp nháy liên tục:
Kiểm tra nguồn & cáp: Rất thường do đứt cáp, lỏng jack nối, hoặc ẩm mốc lọt vào hộp đấu nối (Junction Box).
Lỗi bọt khí: Nếu chỉ bị khi biển động (Rough Sea), hoặc sau khi bẻ lái gấp, nguyên nhân 100% là do bọt khí lọt vào dưới gầm tàu làm suy hao tín hiệu.
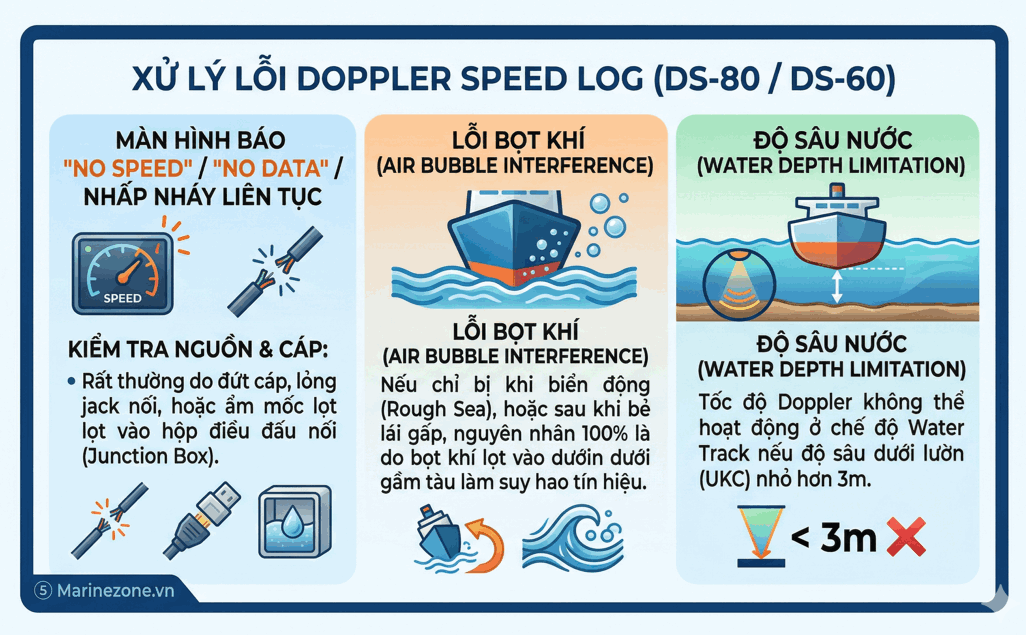
Độ sâu nước: Tốc độ Doppler không thể hoạt động ở chế độ Water Track nếu độ sâu dưới lườn (UKC) nhỏ hơn 3m.
6.2. Tốc độ đo bị sai lệch / Nhảy số thất thường:
Nhiệt độ / Độ mặn: Vận tốc âm thanh trong nước bị ảnh hưởng bởi nhiệt độ (tăng 1độ \approx vận tốc tăng 3m/s) và độ mặn (tăng 1ppt \approx 1.3m/s) 86. Nếu Thermistor (cảm biến nhiệt) hỏng, số liệu sẽ bị sai (Ví dụ: Chữ STW nhấp nháy trên màn hình Furuno DS-80 báo hiệu lỗi cảm biến nhiệt).
Lỗi bù trừ góc (Pitch/Roll): Dù có thiết kế Janus, nhưng nếu tàu chúi mũi (Trim) quá lớn, ví dụ chúi góc \beta, tốc độ hiển thị bị lệch đi một hệ số 1/\cos\beta.
6.3. Lỗi rò rỉ nước tại Transducer / Van chặn:
Xảy ra khi lắp đặt Gate Valve sai kỹ thuật. Nếu kiểm tra bằng cách hút chân không buồng van (bottom vacuum method), bọt khí có thể thoát ra do cấu trúc van bi có khe hở, nhưng điều này là bình thường. Cần tạo áp lực dương trong khoang (pressurize) và theo dõi để kết luận tính kín nước.
7. Hiệu Chuẩn (Calibration) Speed Log - Phương Pháp Chạy Dặm Đo
Không một Speed Log nào lắp xong là chính xác 100%. Bắt buộc phải Hiệu chuẩn dặm đo (Measured Mile Calibration) khi chạy thử đường dài (Sea Trial).
Quy trình chuẩn:
Chạy ổn định theo một hướng, duy trì vòng quay máy (RPM) cố định. Qua 2 điểm mốc trên bờ đã biết khoảng cách chính xác, ghi lại thời gian t_1 và tính tốc độ SOG 1 (S_{g1}).
Quay đầu 180 độ, chạy ngược lại đúng đoạn đường đó, bấm giờ t_2 và tính tốc độ SOG 2 (S_{g2}).
Công thức tính tốc độ qua nước thực tế (S_w): S_w = frac{S_{g1} + S_{g2}}{2}$. (Cách này triệt tiêu hoàn toàn vận tốc của dòng chảy hải lưu/thủy triều).
Lấy S_w thực tế so sánh với tốc độ trên Log (S_{log}). Tỷ lệ sai số: \text{Error (\%)} = \frac{S_w - S_{log}}{S_{log}} \times \%.
Nhập phần trăm bù trừ (Speed Offset) này vào phần cài đặt (System Menu) của thiết bị.
8. Một số lưu ý
Với chi phí đầu tư hàng chục nghìn đô la cho một hệ thống Speed Log (ví dụ như Furuno DS-80 hay JRC), việc bảo vệ thiết bị là tối quan trọng:
Với Chủ tàu: Hãy đảm bảo dọn sạch hà (marine growth) bám ở bề mặt Transducer mỗi khi lên ụ (Dry dock). Tuyệt đối không được sơn (paint) lên bề mặt bộ phát siêu âm, sơn sẽ cản trở hoàn toàn sóng âm truyền đi. Lắp đặt Van cổng (Gate Valve) tuy đắt hơn ban đầu nhưng sẽ tiết kiệm hàng nghìn đô thuê thợ lặn hay lên ụ thay thế sau này.
Với Công ty Sửa chữa Nav/Comm: Luôn trang bị đồng hồ vạn năng kiểm tra trở kháng cuộn dây, kiểm tra tính liên tục của cáp và có sẵn thiết bị giả lập NMEA để kiểm tra tín hiệu $VBW, $VLW xuất ra có đúng định dạng không trước khi kết luận hỏng mainboard.
9. Những Lưu Ý "Sống Còn" Khi Lựa Chọn Thiết Bị Đo Tốc Độ (Speed Log) Cho Tàu Biển
Việc đầu tư hệ thống Speed Log không chỉ là một hạng mục tốn kém mà còn ảnh hưởng trực tiếp đến an toàn hàng hải và khả năng đăng kiểm của tàu. Để tối ưu hóa chi phí và đảm bảo thiết bị hoạt động bền bỉ, dưới đây là những lưu ý, cần đặc biệt quan tâm khi lựa chọn:
9.1. Tuân thủ tuyệt đối quy định phân cấp tàu của IMO/SOLAS
Yếu tố đầu tiên và bắt buộc là phải chọn cấu hình thiết bị phù hợp với tổng dung tích (Gross Tonnage - GT) của tàu theo quy định của Công ước SOLAS Chương V, Cụ thể:
Tàu từ 300 GT trở lên và mọi tàu khách: Bắt buộc phải trang bị thiết bị đo tốc độ và quãng đường qua nước (STW).
Tàu từ 50.000 GT trở lên: Phải được trang bị thêm khả năng đo tốc độ so với đất (SOG) theo cả hướng dọc tàu (tiến/lùi) và hướng ngang tàu (athwartships).
Lưu ý "bẫy" đăng kiểm (MSC.334(90) / MSC.1/Circ.1429): Đối với các tàu từ 50.000 GT, Ủy ban An toàn Hàng hải (IMO MSC) đã làm rõ rằng quy định này phải được đáp ứng bằng HAI thiết bị hoàn toàn riêng biệt. Cụ thể, bạn không thể dùng một máy Doppler duy nhất đo cả STW và SOG để thỏa mãn luật, mà phải dùng một máy đo STW (ví dụ: EM Log) và một máy riêng biệt để đo SOG đa hướng (ví dụ: Doppler Log chế độ Bottom Track) nhằm đảm bảo tính dự phòng.
Tùy vào loại tàu và mục đích điều động, hãy chọn công nghệ phù hợp:
Máy đo tốc độ Doppler (Doppler Speed Log): Có độ chính xác cực cao, có thể đo tốc độ ở tốc độ rất chậm, và đặc biệt hữu ích khi cập cầu nhờ khả năng cung cấp tốc độ ngang (Athwartship) thông qua cấu hình đầu dò Janus (Janus Configuration) có khả năng loại bỏ sai số do tàu chúi mũi hay nhồi sóng. Tuy nhiên, công nghệ siêu âm dễ bị nhiễu do bọt khí (aeration) tạo ra khi biển động, gần chân vịt mũi hoặc nước có nhiều hạt lơ lửng.
Máy đo tốc độ Điện từ (EM Log): Lựa chọn cực kỳ kinh tế, bền bỉ vì hoàn toàn không có bộ phận chuyển động. Rất lý tưởng làm thiết bị độc lập đo STW. Tuy nhiên, nó chỉ đo được vận tốc qua nước (STW) ở hướng dọc tàu và độ chính xác có thể bị ảnh hưởng đôi chút bởi biến thiên độ mặn, nhiệt độ nước biển hoặc dòng chảy tại lớp biên (boundary layer) ma sát với vỏ tàu.
9.3. Chọn phương án lắp đặt cơ khí: Có van chặn (Gate Valve) hay dùng bệ không van (Tank/Flange)
Lựa chọn phần cứng cơ khí đi kèm đầu dò (Transducer) sẽ quyết định chi phí bảo dưỡng dài hạn:
Hệ thống có Van Cổng (Gate valve): Dù chi phí đầu tư ban đầu cao hơn, nhưng đây là lựa chọn thông minh và tiết kiệm nhất về dài hạn. Van chặn cho phép các kỹ sư dễ dàng rút đầu dò lên bên trong vỏ tàu để bảo dưỡng, làm sạch sinh vật biển bám hoặc thay thế thiết bị ngay cả khi tàu đang nổi trên mặt nước (không cần lên ụ khô - dry docking).
Hệ thống dạng khoang/bệ hàn chết (Tank / Flush mounting): Rẻ hơn nhưng việc bảo dưỡng cực kỳ tốn kém. Nếu đầu dò hỏng, bạn buộc phải chờ đợt lên ụ tiếp theo, hoặc tốn chi phí khổng lồ thuê thợ lặn chuyên nghiệp thao tác thay thế dưới nước, thậm chí phải dùng nắp bịt (cofferdam).
9.4. Đánh giá dải hoạt động và tiêu chuẩn hiệu suất theo MSC.96(72)
Để được phê duyệt kiểu (Type Approval) và cấp giấy chứng nhận, thiết bị bạn mua phải đáp ứng nghiêm ngặt các dải hoạt động vật lý theo tiêu chuẩn:
Độ sâu tối thiểu (Working Depth): Thiết bị đo STW phải cam kết hoạt động chính xác khi mực nước dưới lườn tàu (UKC) sâu hơn 3 mét. Đối với đo SOG, cảm biến phải hoạt động chính xác ở độ sâu dưới lườn sâu hơn 2 mét. Nếu độ sâu nhỏ hơn mức này, kết quả đo có thể sai lệch.
Dung sai chính xác (Accuracy): Đối với màn hình số, sai số không được vượt quá 2% vận tốc thực của tàu, hoặc 0.2 knot (chọn giá trị nào lớn hơn). Đối với khoảng cách (quãng đường), sai số tối đa là 2% khoảng cách chạy trong 1 giờ hoặc 0.2 hải lý mỗi giờ.
Biên độ dao động: Mọi thiết bị phải hoạt động trơn tru khi tàu bị lắc ngang (roll) tới ±10° và lắc dọc (pitch) tới ±5°.
9.5. Tính tương thích giao diện dữ liệu và tích hợp hệ thống
Speed log là cảm biến đầu nguồn quan trọng nhất cho radar ARPA và ECDIS. Do đó, thiết bị được chọn phải đáp ứng khả năng giao tiếp:
Cổng truyền dữ liệu: Phải trang bị giao tiếp nối tiếp kỹ thuật số tiêu chuẩn quốc tế IEC 61162-1 (NMEA 0183).
Câu lệnh (Sentences) đầy đủ: Đảm bảo mạch xuất đủ các câu lệnh dữ liệu quan trọng như $VBW (cho SOG/STW ngang, dọc) và $VLW (cho quãng đường đã chạy) với tần suất cập nhật tín hiệu đạt chuẩn.
Tín hiệu Relay: Ngoài truyền dữ liệu số, nhiều hệ thống VDR và Radar đời cũ yêu cầu tín hiệu dạng "tiếp điểm khô" (contact closure/relay), hãy kiểm tra xem Speed Log có cổng xuất xung với định mức 1 xung cho mỗi 0.005 hải lý (khoảng 200 xung/hải lý) hay không.
10. Chuyên mục FQA: Giải Đáp Các Thắc Mắc Thường Gặp Về Máy Đo Tốc Độ Tàu Biển (Speed Log)
Với tư cách là chuyên gia Nav & Comm, tôi thường xuyên nhận được những câu hỏi thực tế từ các chủ tàu và kỹ sư vận hành. Dưới đây là 6 câu hỏi phổ biến nhất và giải đáp chi tiết:
Câu hỏi 1: Tốc độ STW và SOG khác nhau như thế nào, và tại sao tàu biển lại cần cả hai thông số này?
Trả lời:
STW (Speed Through Water - Tốc độ qua nước): Là vận tốc của tàu so với khối nước xung quanh, không tính đến sức đẩy của dòng chảy 1. Đây là thông số mang tính sống còn để đưa vào hệ thống Radar/ARPA nhằm tính toán các véc-tơ tránh va chạm (CPA/TCPA) theo luật COLREG .
SOG (Speed Over Ground - Tốc độ so với đất): Là vận tốc thực tế của tàu so với bề mặt đáy biển hoặc vỏ Trái Đất, bao gồm cả ảnh hưởng của gió, dòng chảy và thủy triều 1. SOG được dùng để xác định vị trí trên hải đồ điện tử (ECDIS) và tính toán thời gian đến đích (ETA).
Câu hỏi 2: Theo luật SOLAS, đối với tàu trên 50.000 GT, tôi có thể dùng một máy Doppler Log duy nhất để đo cả STW và SOG được không?
Trả lời: Tuyệt đối không. Đây là lỗi đăng kiểm rất nhiều chủ tàu mắc phải. Dù một máy Doppler hiện đại có thể đo cả STW và SOG, nhưng Ủy ban An toàn Hàng hải IMO đã quy định rõ trong thông tư MSC.1/Circ.1429 và nghị quyết MSC.334(90) rằng: Tàu từ 50.000 GT trở lên phải được trang bị hai thiết bị đo tốc độ hoàn toàn riêng biệt. Một thiết bị đo STW (thường là EM Log hoặc Doppler) và một thiết bị độc lập khác để đo SOG theo hướng dọc và ngang tàu.
Câu hỏi 3: Tại sao trong điều kiện sóng to gió lớn, màn hình Speed Log lại bị "treo" số hoặc báo lỗi "**.*"?
Trả lời: Nguyên nhân cốt lõi là hiện tượng tạo bọt khí (Aeration) lọt vào dưới gầm tàu. Khi biển động (nhồi sóng) hoặc khi tàu bẻ lái gấp, bọt khí sẽ bị cuốn xuống đáy và che khuất bề mặt đầu dò (Transducer). Sóng siêu âm của Doppler hoặc từ trường của máy EM Log không thể xuyên qua lớp bọt khí này, gây ra tình trạng mất tín hiệu hoặc sai số. Nếu tín hiệu bị lỗi liên tục quá 30 giây, các máy như Furuno DS-80 sẽ đóng băng hiển thị (chữ "KT" nhấp nháy) và chuyển sang báo "**.*".
Câu hỏi 4: Độ sâu nước tối thiểu để máy đo tốc độ có thể hoạt động chính xác là bao nhiêu?
Trả lời: Để vượt qua bài kiểm tra Type Approval theo tiêu chuẩn IMO MSC.96(72) và A.824(19), thiết bị đo tốc độ phải đáp ứng các ngưỡng độ sâu vật lý sau:
Để đo tốc độ qua nước (STW), máy phải hoạt động chính xác khi khoảng sáng gầm tàu (khoảng cách từ sống tàu đến đáy biển - UKC) sâu hơn 3 mét.
Để đo tốc độ so với đất (SOG), thiết bị (đặc biệt là Doppler ở chế độ Bottom Track) phải duy trì độ chính xác khi UKC sâu hơn 2 mét. Nếu đi vào vùng nước cạn hơn mức này, tín hiệu dội lại sẽ bị nhiễu và gây ra sai lệch.
Câu hỏi 5: Cấu hình đầu dò "Janus" (Janus Configuration) trên máy Doppler là gì và nó triệt tiêu sai số như thế nào?
Trả lời: Janus Configuration là một thiết kế cơ học xuất sắc. Thay vì chỉ phát một chùm tia sóng âm, hệ thống sẽ sử dụng hai (hoặc bốn) chùm tia đối xứng: một hướng về mũi tàu và một hướng về đuôi tàu. Khi tàu bị lắc dọc (pitching) hoặc nhồi lên hụp xuống (heaving), sai số làm tăng tần số Doppler ở chùm tia phía trước sẽ được triệt tiêu hoàn toàn bởi sai số làm giảm tần số ở chùm tia phía sau. Thuật toán cộng gộp này giúp hệ thống Doppler Log duy trì độ chính xác cực cao ngay cả khi tàu hoạt động trong thời tiết xấu.
Câu hỏi 6: Sau khi thay thế đầu dò Transducer, làm thế nào để hiệu chuẩn (Calibrate) lại Speed Log cho chuẩn xác?
Trả lời: Việc thay mới Transducer hoặc bo mạch bắt buộc phải được hiệu chuẩn lại thông qua phương pháp Chạy dặm đo (Measured Mile Calibration) trong quá trình chạy thử đường dài (Sea Trial).Tàu sẽ chạy khứ hồi (chạy đi và chạy ngược lại) trên một quãng đường biết trước với vòng quay máy (RPM) ổn định. Việc chạy khứ hồi giúp triệt tiêu vận tốc của dòng chảy/thủy triều, từ đó tính ra tốc độ STW thực tế một cách chuẩn xác nhất . Khi so sánh STW thực tế này với số hiển thị trên máy, ta sẽ ra được Phần trăm sai số (Speed Offset). Kỹ sư Nav & Comm sẽ nhập chỉ số Offset này (thường nằm trong dải -25.0% đến +25.0%) vào menu cài đặt của thiết bị (System Menu) để thiết bị tự động bù trừ.
Kết luận: Máy đo tốc độ (Speed Log) là một thiết bị có bề dày lịch sử, hiện đại hóa qua các định luật vật lý từ điện từ học Faraday đến hiệu ứng siêu âm Doppler. Việc hiểu tường tận nguyên lý, quy định SOLAS, đến kỹ thuật đấu nối NMEA sẽ giúp đội ngũ Nav & Comm và Chủ tàu đảm bảo an toàn tuyệt đối cho những chuyến hải trình.
















.png)




