







Đo Nghiêng Điện Tử Electronic Inclinometer -Marine Zone
PHẦN 1: MÁY ĐO NGHIÊNG ĐIỆN TỬ ELECTRONIC INCLINOMETER LÀ GÌ? VÌ SAO PHẢI THAY THẾ MÁY CƠ HỌC?
1.1. Bản Chất Công Nghệ: Vượt Xa Chiếc "Bọt Thủy" Và Quả Lắc Truyền Thống
Hàng trăm năm nay, đi biển chúng ta đã quá quen với chiếc bọt thủy (spirit level) hay máy đo nghiêng quả lắc cơ học (pendulum) . Mặc dù đơn giản, nhưng chúng mang một tử huyệt chí mạng: chúng không phân biệt được giữa lực hấp dẫn tĩnh và gia tốc động học do chuyển động của sóng hoặc thân tàu .
Khi tàu gặp thời tiết xấu, quán tính của quả lắc hay sự dao động của chất lỏng sẽ bị ảnh hưởng bởi gia tốc vọt tới (surging) hay trượt ngang, tạo ra những sai số khổng lồ, đôi khi lên tới 30% . Hệ quả là hiện tượng "vượt mức" (overshooting) xảy ra, khiến thuyền trưởng nhận được thông tin sai lệch vào đúng thời khắc sinh tử.
Máy đo nghiêng điện tử (Electronic Inclinometer) ra đời để giải quyết triệt để rủi ro đó. Về bản chất, đây là một hệ thống cảm biến trạng thái rắn (solid-state sensor) vô cùng tinh vi, sử dụng công nghệ vi cơ điện tử MEMS (Micro-Electro-Mechanical Systems) kết hợp với gia tốc kế. Con chip nhỏ bé này đo gia tốc tĩnh của trọng trường dọc theo nhiều trục để tính toán góc nghiêng. Đặc biệt, nhờ các thuật toán xử lý tín hiệu và lọc nhiễu phức tạp, thiết bị điện tử có thể loại trừ hoàn toàn các dao động động học như độ rung máy chính hay sự lắc lư của sóng.
Kết quả là chúng ta có một thiết bị đo góc nghiêng hiển thị kỹ thuật số liên tục (real-time) với độ phân giải và độ chính xác cực cao, thường đạt mức ±0.1 độ.
1.2. Những Thông Số Động Lực Học Sống Còn
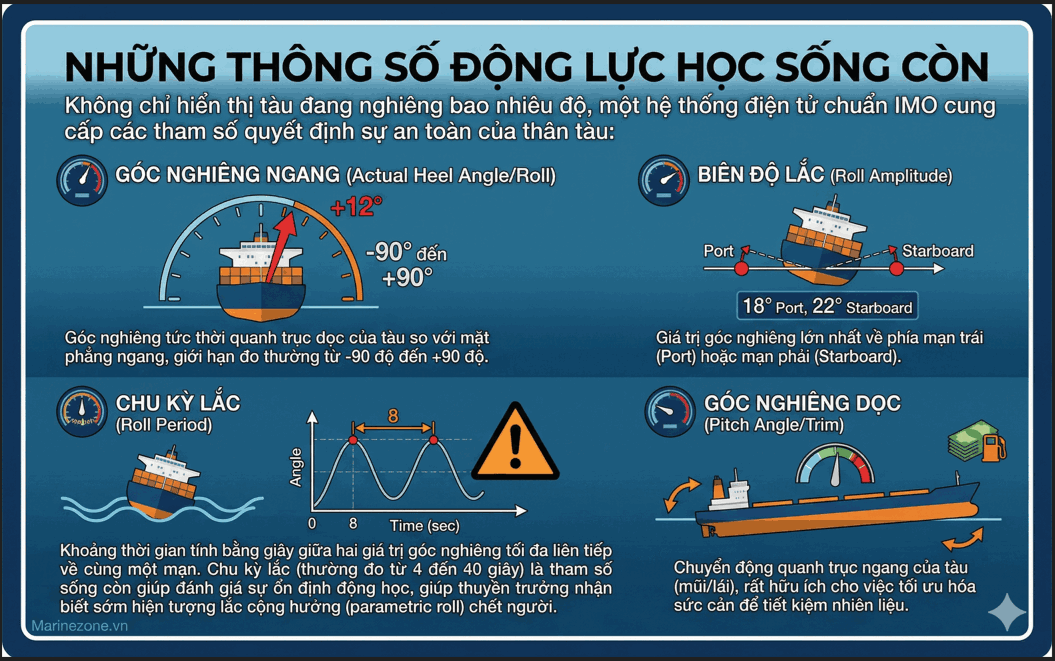
Không chỉ hiển thị tàu đang nghiêng bao nhiêu độ, một hệ thống điện tử chuẩn IMO cung cấp các tham số quyết định sự an toàn của thân tàu:
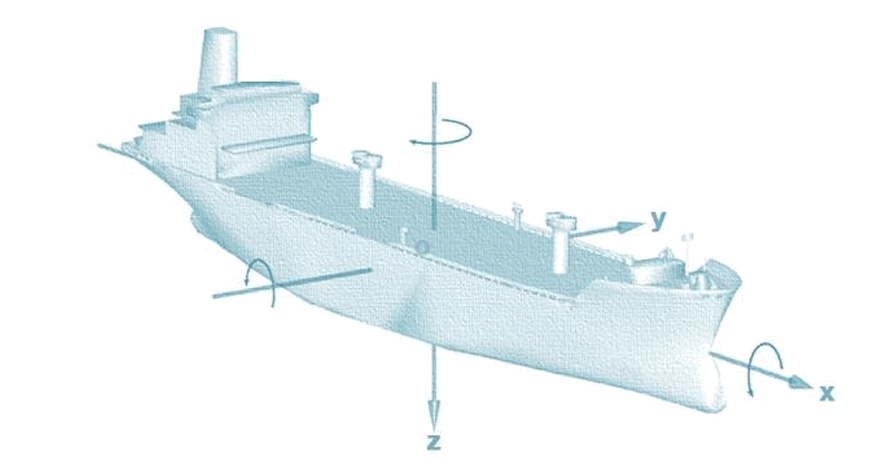
Góc nghiêng ngang (Actual Heel Angle/Roll): Góc nghiêng tức thời quanh trục dọc của tàu so với mặt phẳng ngang, giới hạn đo thường từ -90 độ đến +90 độ.
Biên độ lắc (Roll Amplitude): Giá trị góc nghiêng lớn nhất về phía mạn trái (Port) hoặc mạn phải (Starboard).
Chu kỳ lắc (Roll Period): Khoảng thời gian tính bằng giây giữa hai giá trị góc nghiêng tối đa liên tiếp về cùng một mạn. Chu kỳ lắc (thường đo từ 4 đến 40 giây) là tham số sống còn giúp đánh giá sự ổn định động học, giúp thuyền trưởng nhận biết sớm hiện tượng lắc cộng hưởng (parametric roll) chết người .
Góc nghiêng dọc (Pitch Angle/Trim): Chuyển động quanh trục ngang của tàu (mũi/lái), rất hữu ích cho việc tối ưu hóa sức cản để tiết kiệm nhiên liệu.
PHẦN 2: QUY CHUẨN IMO
Việc nâng cấp lên máy đo nghiêng điện tử không còn là lựa chọn mang tính sở thích, mà là một lệnh bắt buộc từ Tổ chức Hàng hải Quốc tế (IMO), xuất phát từ những bài học đắt giá về sự cố mất container trên biển và lật tàu hàng rời do hóa lỏng hàng hóa.
2.1. Sửa Đổi SOLAS Chương V - Nghị Quyết MSC.532(107)
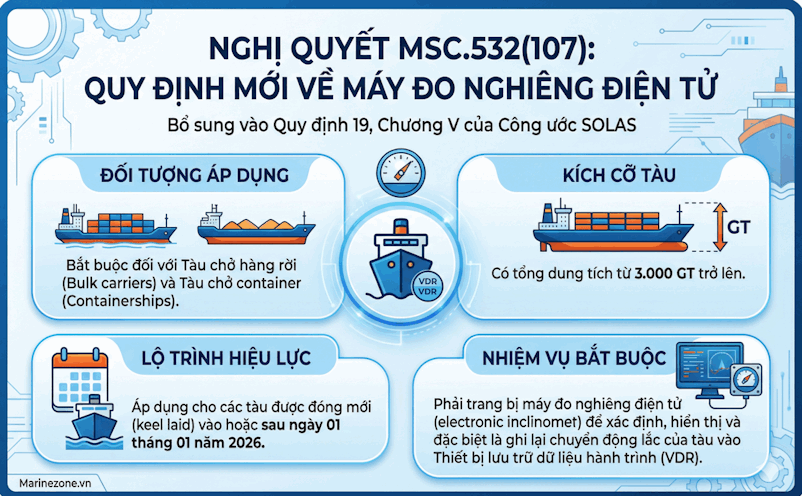
Tại phiên họp thứ 107, Ủy ban An toàn Hàng hải (MSC) đã thông qua Nghị quyết MSC.532(107), bổ sung quy định mới vào Quy định 19, Chương V của Công ước SOLAS. Đây là "tối hậu thư" mà mọi chủ tàu phải nắm rõ:
Đối tượng áp dụng: Bắt buộc đối với Tàu chở hàng rời (Bulk carriers) và Tàu chở container (Containerships).
Kích cỡ tàu: Có tổng dung tích từ 3.000 GT trở lên.
Lộ trình hiệu lực: Áp dụng cho các tàu được đóng mới (keel laid) vào hoặc sau ngày 01 tháng 01 năm 2026 .
Nhiệm vụ bắt buộc: Phải trang bị máy đo nghiêng điện tử (electronic inclinometer) để xác định, hiển thị và đặc biệt là ghi lại chuyển động lắc của tàu vào Thiết bị lưu trữ dữ liệu hành trình (VDR).
Ngoài ra, mục danh xưng "Container ship" sẽ chính thức xuất hiện trên Giấy chứng nhận An toàn Trang thiết bị (Safety Equipment Certificate), và "Electronic inclinometer" sẽ trở thành một danh mục kiểm tra bắt buộc trong Bản ghi thiết bị (Record of Equipment - Form E và Form C).
2.2. Tiêu Chuẩn Hiệu Suất Kỹ Thuật - Nghị Quyết MSC.363(92)
Mọi máy đo nghiêng điện tử lắp trên tàu biển phải tuân thủ nghiêm ngặt tiêu chuẩn hiệu suất MSC.363(92). Các thông số phần cứng phải đạt chuẩn:
Độ chính xác: Sai số góc không được vượt quá 5% giá trị đọc hoặc ±1 độ (lấy giá trị lớn hơn); sai số thời gian chu kỳ không vượt quá ±1 giây.
Mức độ chịu đựng động lực học: Thiết bị phải đảm bảo tính chính xác ngay cả khi chịu gia tốc ngang từ -0.8 g đến +0.8 g, cũng như không bị ảnh hưởng bởi độ dâng (heaving), trượt ngang (swaying) hay vọt tới (surging).
Kết nối kỹ thuật số: Phải truyền được dữ liệu góc nghiêng tức thời vào hệ thống VDR với tần số cập nhật tối thiểu 5 Hz thông qua giao tiếp hai chiều.
Yêu cầu môi trường & nguồn: Chịu được nhiệt độ hoạt động từ -15°C đến +55°C (tuẩn chuẩn IEC 60945), và được cung cấp bởi nguồn điện chính kết hợp nguồn điện sự cố của tàu.
2.3. Quy Định Của Cục Đăng Kiểm Việt Nam (VR)
Tại Việt Nam, Cục Đăng kiểm (VR) luôn bám sát IMO.
Thông báo kỹ thuật 01TI/26TB: Cụ thể hóa yêu cầu trang bị thiết bị đo độ nghiêng điện tử theo Nghị quyết MSC.532(107) cho tàu đóng mới từ 01/01/2026. Đối với tàu hiện có, dù luật chưa hồi tố bắt buộc thay ngay, VR khuyến cáo chủ tàu khi thay thế thiết bị cũ nên nâng cấp lên loại điện tử để nâng cao an toàn.
Quy chuẩn QCVN 42:2015/BGTVT: Mọi thiết bị hàng hải, bao gồm máy đo nghiêng, sử dụng trên tàu có dung tích GT ≥ 1600 phải được Đăng kiểm thẩm định và chứng nhận.
Quy chuẩn QCVN 72:2013/BGTVT (VR-SB): Đáng chú ý, các tàu hoạt động tuyến sông biển (VR-SB) cũng phải chịu những quy chuẩn an toàn khắt khe về sức chịu sóng gió (cao 2.5 mét) và yêu cầu có trang bị thước đo độ nghiêng. Xu hướng số hóa an toàn hàng hải đang dần phủ sóng đến cả phương tiện thủy nội địa cấp cao.
PHẦN 3: LỢI ÍCH TỐI THƯỢNG CỦA MÁY ĐO NGHIÊNG ĐIỆN TỬ
Là một kỹ sư thường xuyên xử lý các hệ thống hàng hải, tôi khẳng định thiết bị này không chỉ để đối phó thanh tra PSC hay Đăng kiểm, mà nó mang lại giá trị vận hành vô giá:
1. Bảo Vệ Sinh Mạng & Chống Lật Tàu (Capsize Prevention):
Với tàu chở quặng hoặc hàng rời, nguy cơ hàng hóa bị hóa lỏng (liquefaction) do ẩm sẽ dịch chuyển trọng tâm tàu cực kỳ nhanh. Máy đo nghiêng điện tử có tính năng Báo động chủ động (Proactive Alarms). Khi tàu nghiêng sát ngưỡng nguy hiểm (ví dụ 25°), hệ thống lập tức hú còi báo động qua Hệ thống quản lý báo động buồng lái (BAMS), giúp sỹ quan đi ca lập tức xả ballast dằn lại hoặc đổi hướng lái.
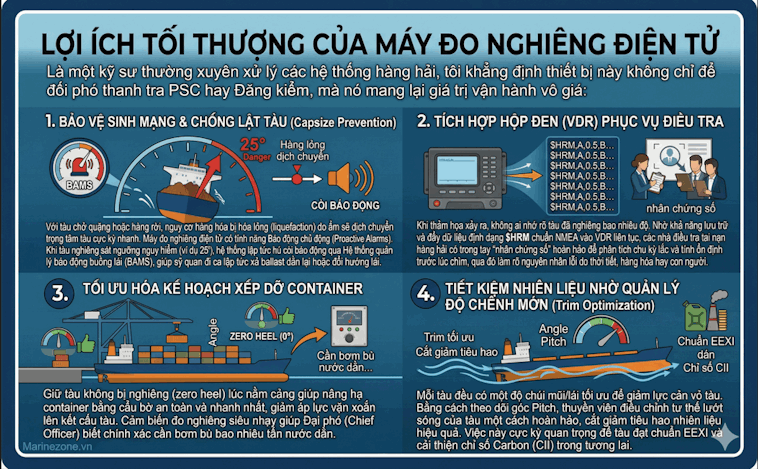
2. Tích Hợp Hộp Đen (VDR) Phục Vụ Điều Tra:
Khi thảm họa xảy ra, không ai nhớ rõ tàu đã nghiêng bao nhiêu độ. Nhờ khả năng lưu trữ và đẩy dữ liệu định dạng $HRM chuẩn NMEA vào VDR liên tục, các nhà điều tra tai nạn hàng hải có trong tay "nhân chứng số" hoàn hảo để phân tích chu kỳ lắc và tính ổn định trước lúc chìm, qua đó làm rõ nguyên nhân lỗi do thời tiết, hàng hóa hay con người.
3. Tối Ưu Hóa Kế Hoạch Xếp Dỡ Container:
Giữ tàu không bị nghiêng (zero heel) lúc nằm cảng giúp nâng hạ container bằng cẩu bờ an toàn và nhanh nhất, giảm áp lực vặn xoắn lên kết cấu tàu. Cảm biến đo nghiêng siêu nhạy giúp Đại phó (Chief Officer) biết chính xác cần bơm bù bao nhiêu tấn nước dằn.
4. Tiết Kiệm Nhiên Liệu Nhờ Quản Lý Độ Chênh Mớn (Trim Optimization):
Mỗi tàu đều có một độ chúi mũi/lái tối ưu để giảm lực cản vỏ tàu. Bằng cách theo dõi góc Pitch, thuyền viên điều chỉnh tư thế lướt sóng của tàu một cách hoàn hảo, cắt giảm tiêu hao nhiên liệu hiệu quả. Việc này cực kỳ quan trọng để tàu đạt chuẩn EEXI và cải thiện chỉ số Carbon (CII) trong tương lai.
PHẦN 4: ĐẶC TÍNH KỸ THUẬT VÀ CẤU HÌNH HỆ THỐNG
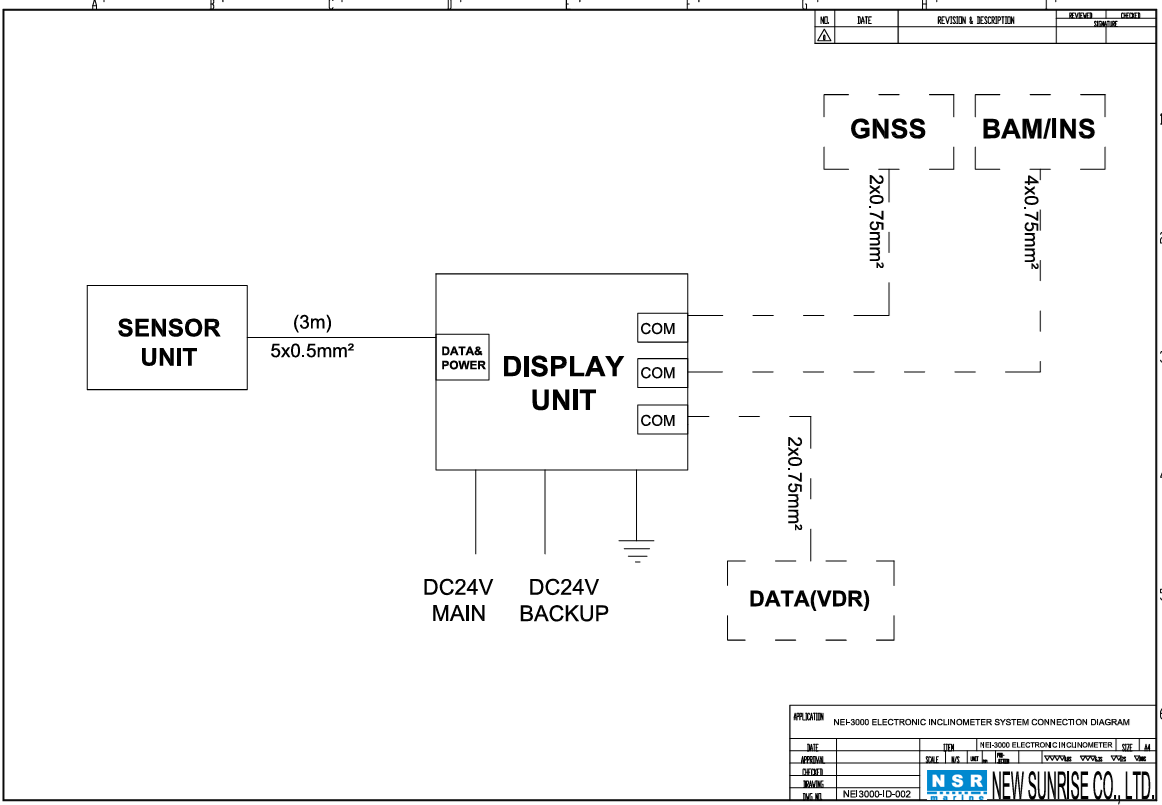
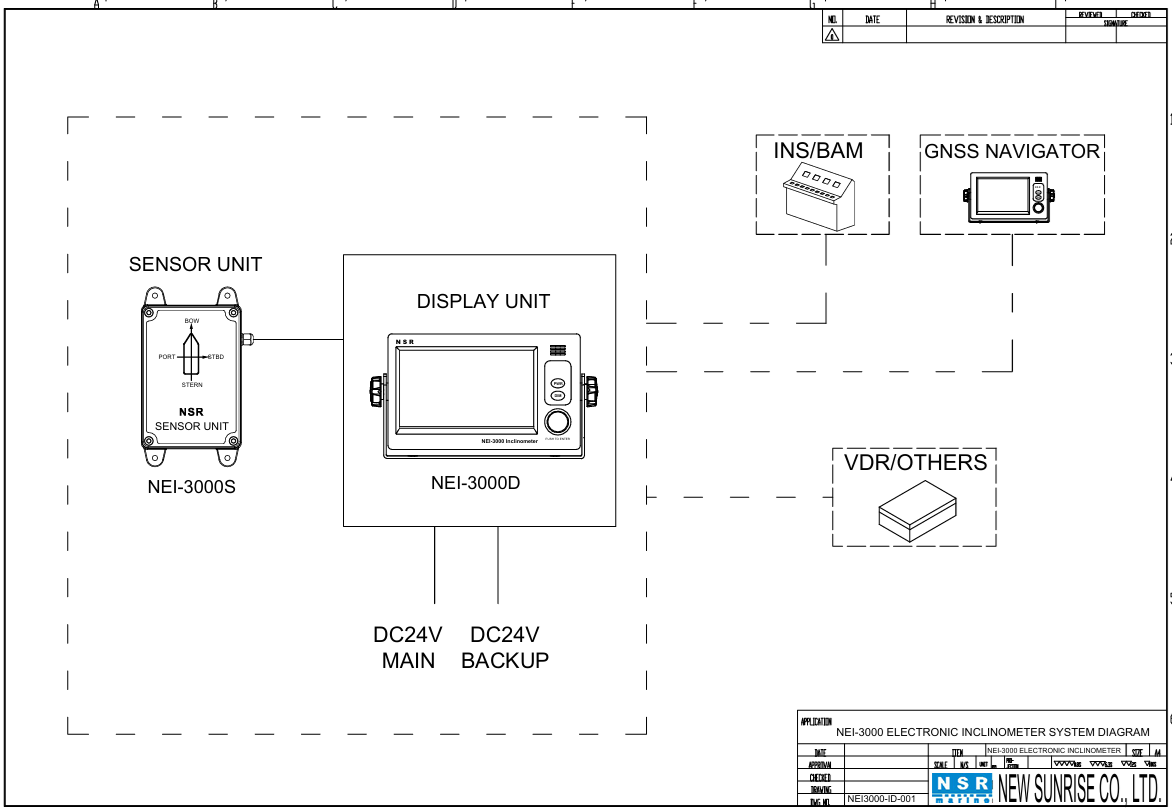
Một hệ thống đo nghiêng điện tử cơ bản (ví dụ như hệ NEI-3000 của hãng NSR) sẽ bao gồm các khối chính sau:
4.1. Đơn vị Cảm Biến (Sensor Unit):
Khối "não bộ" cảm nhận chứa chip MEMS, được đóng gói trong vỏ nhôm đúc hoặc inox đạt chuẩn kín nước IP66/IP68. Khối này phải hoạt động bền bỉ trong sương muối, chịu được rung chấn của buồng máy và sóng đập.
4.2. Đơn vị Hiển Thị (Display Unit):
Thường là màn hình LCD cỡ 7 đến 8.4 inch đặt tại bàn điều khiển buồng lái. Màn hình hiển thị góc lắc bằng kim đồng hồ ảo (Analog) và con số điện tử (Digital). Chức năng làm mờ ánh sáng (Dimming) giúp không gây chói mắt đi ca đêm. Hệ thống thường hiển thị song song biểu đồ lịch sử 3 phút góc nghiêng và 30 phút cho biên độ.
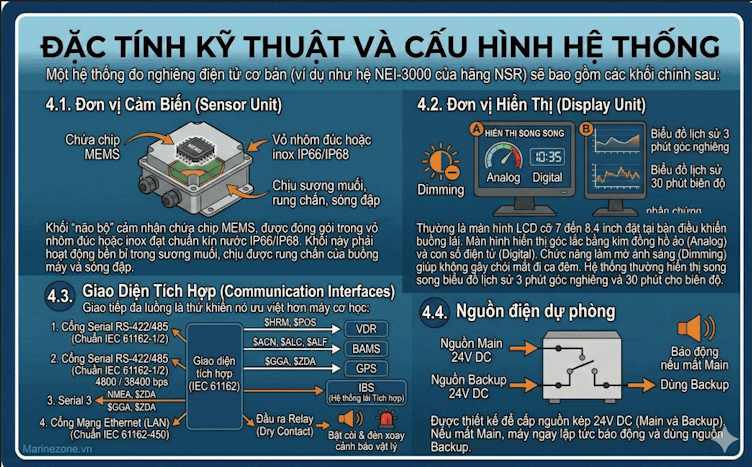
4.3. Giao Diện Tích Hợp (Communication Interfaces):
Giao tiếp đa luồng là thứ khiến nó ưu việt hơn máy cơ học:
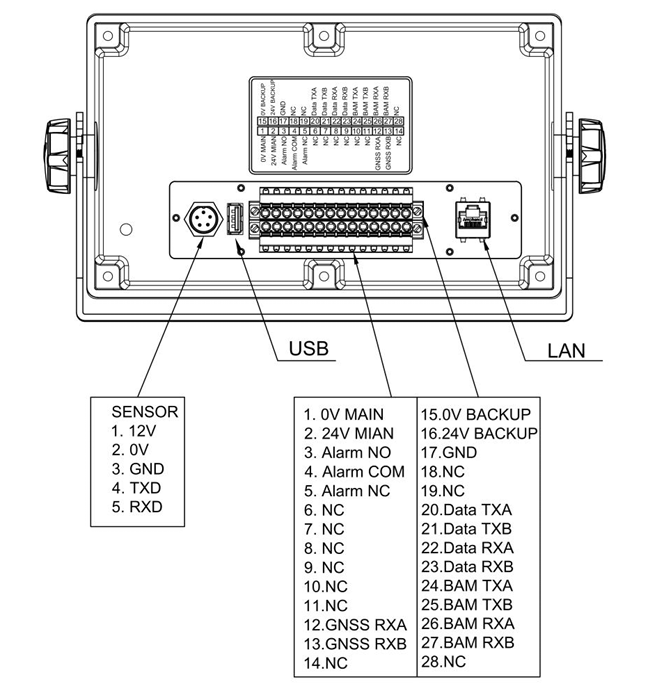
Cổng Serial RS-422/485 (Chuẩn IEC 61162-1/2): Xuất dữ liệu bản tin $HRM, $POS sang VDR với tốc độ truyền 4800 hoặc 38400 bps . Kết nối với hệ thống báo động BAMS thông qua các bản tin $ACN, $ALC, $ALF. Nhận dữ liệu tọa độ và thời gian từ máy GPS ($GGA, $ZDA).
Cổng Mạng Ethernet: Cho chuẩn giao tiếp LAN (IEC 61162-450) để hòa mạng vào Hệ thống Buồng lái Tích hợp (IBS).
Đầu ra Relay (Dry Contact): Cấp tín hiệu đóng/mở mạch (NC/NO) để bật còi và đèn xoay cảnh báo vật lý.
Nguồn điện dự phòng: Được thiết kế để cấp nguồn kép 24V DC (Main và Backup). Nếu mất Main, máy ngay lập tức báo động và dùng nguồn Backup.
PHẦN 5: BÍ QUYẾT LẮP ĐẶT, HIỆU CHUẨN VÀ BẢO TRÌ
5.1. Lựa Chọn Vị Trí Gắn Cảm Biến (Sensor Mounting)
Tuyệt đối tuân thủ trục tàu: Cảm biến phải được đặt sao cho hướng báo mũi tàu (A+ / Mũi) hoàn toàn song song với đường tâm dọc (Centerline) của con tàu. Độ lệch cơ học lúc lắp đặt sẽ là điểm chí mạng phá hỏng mọi kết quả.
Gần trọng tâm và tâm quay (Roll Center): Đây là nguyên tắc vàng! Không gắn cảm biến ở tít trên đỉnh cột buồm (mast) hay sát mũi/lái. Đặt quá xa tâm lắc sẽ khiến gia tốc tiếp tuyến và ly tâm cộng hưởng vào cảm biến trọng trường, gây nhiễu loạn phép đo nghiêng tĩnh.
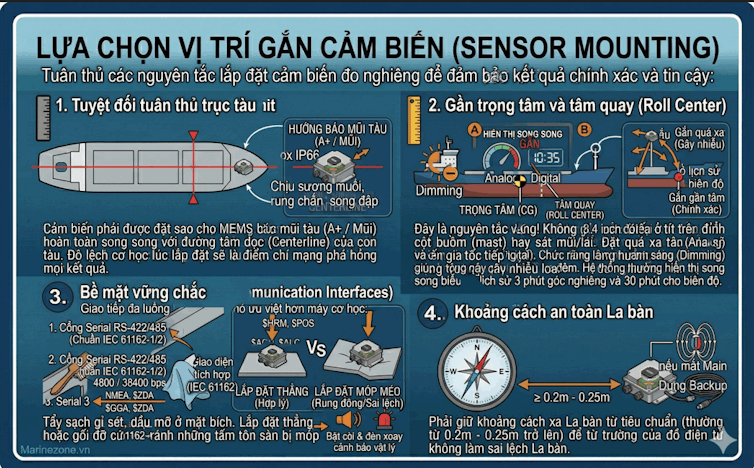
Bề mặt vững chắc: Tẩy sạch gỉ sét, dầu mỡ ở mặt bích. Lắp đặt thẳng trên tôn boong hoặc gối đỡ cứng vững, tránh những tấm tôn sàn bị móp méo hay rung bần bật.
Khoảng cách an toàn La bàn: Phải giữ khoảng cách cách xa La bàn từ tiêu chuẩn (thường từ 0.2m - 0.25m trở lên) để từ trường của đồ điện tử không làm sai lệch La bàn.
5.2. Hiệu Chuẩn Hệ Thống (Calibration & Zeroing)
Máy xuất xưởng có thể đã chuẩn, nhưng lắp lên boong mỗi tàu lại khác nhau. Việc hiệu chuẩn điểm Không (Zeroing) là bắt buộc.
Điều kiện lý tưởng: Nên set Zero khi tàu nằm trong Ụ khô (Dry dock) hoặc neo đậu tại bến nước tĩnh lặng, hầm hàng trống và mớn nước thật cân bằng (Even keel & Upright).
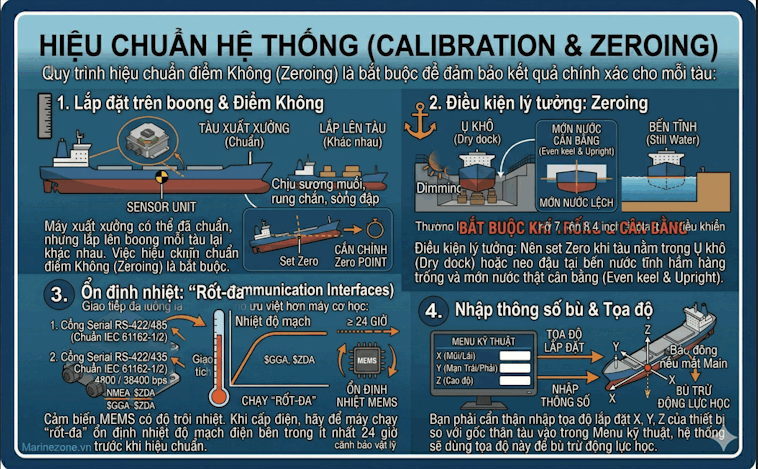
Ổn định nhiệt: Cảm biến MEMS có độ trôi nhiệt. Khi cấp điện, hãy để máy chạy "rốt-đa" ổn định nhiệt độ mạch điện bên trong ít nhất 24 giờ trước khi hiệu chuẩn.
Nhập thông số bù: Bạn phải cẩn thận nhập tọa độ lắp đặt X, Y, Z của thiết bị so với gốc thân tàu vào trong Menu kỹ thuật, hệ thống sẽ dùng tọa độ này để bù trừ động lực học.
5.3. Bảo Trì và Xử Lý Sự Cố (Troubleshooting)
Máy điện tử rất ít hỏng hóc cơ học. Thường chỉ gặp:
Lỗi SENSOR FAULT: Mất tín hiệu truyền thông giữa Cảm biến và Màn hình. 90% trường hợp là do chuột cắn đứt cáp, hoặc đầu giắc cắm bị oxy hóa nước biển (Water Ingress). Hãy đo thông mạch cáp, vệ sinh giắc cắm.
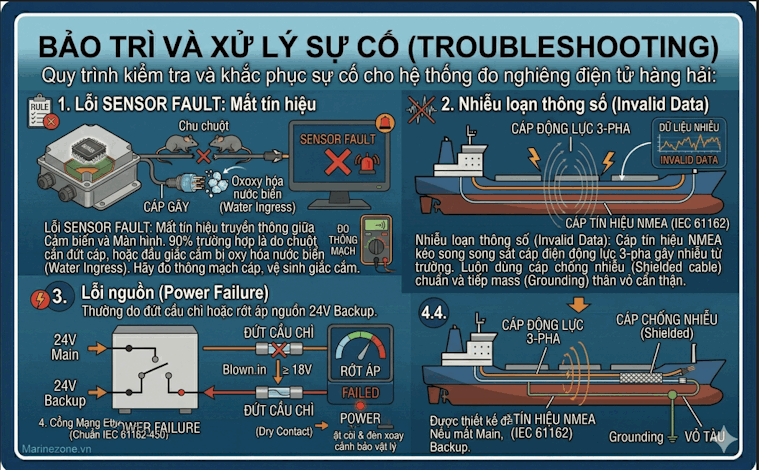
Nhiễu loạn thông số (Invalid Data): Cáp tín hiệu NMEA kéo song song sát cáp điện động lực 3-pha gây nhiễu từ trường. Luôn dùng cáp chống nhiễu (Shielded cable) chuẩn và tiếp mass (Grounding) thân vỏ cẩn thận.
Lỗi nguồn (Power Failure): Thường do đứt cầu chì hoặc rớt áp nguồn 24V Backup.
PHẦN 6: ĐÁNH GIÁ CÁC THƯƠNG HIỆU MÁY ĐO NGHIÊNG NỔI BẬT THỊ TRƯỜNG
Dưới đây là các thương hiệu máy đo nghiêng trên thị trường
1. Thương hiệu NSR Marine (Mã: NEI-3000)
NSR (New Sunrise) từ Trung Quốc, cung cấp mẫu NEI-3000 cực kỳ đáng tiền.
Công nghệ: Màn hình cảm ứng màu 7 inch, chạy Android mượt mà. Đầy đủ cổng ra NMEA cho GNSS, VDR, BAM.
Chứng chỉ: Sở hữu bộ chứng nhận xịn sò từ DNV (Châu Âu - MED Wheelmark) và CCS (Đăng kiểm Trung Quốc) . Rất thích hợp cho đội tàu chở hàng rời chạy quốc tế vì giá tốt, kỹ thuật dễ lắp.
2. Thương hiệu Daniamant (Mã: DanEI-300)
Niềm tự hào của Anh/Đan Mạch, đây là thiết bị đầu tiên trên thế giới nhận phê duyệt Wheelmark cho luật IMO đo nghiêng mới.
Công nghệ: Tính toán 6 bậc tự do (6 DoF), bù trừ chuyển động nhấp nhô (heave) và dạt ngang (sway) xuất sắc 100. Siêu bền vững trong điều kiện băng giá. Phù hợp cho tàu kéo dịch vụ ngoài khơi (OSV), tàu dầu hóa chất.
3. Thương hiệu Hoppe Marine
Đại diện kỹ thuật từ nước Đức. Hoppe sản xuất hệ thống tự động hóa sâu như Anti-Heeling.
Công nghệ: Độ chính xác góc siêu cấp 0.11° RMS. Màn hình 5.7 inch, vi xử lý ARM Cortex A9. Kết nối Ethernet hoàn hảo. Giải pháp số 1 cho các siêu tàu Container đóng mới tại Châu Âu.
4. Thương hiệu JRC (Japan Radio Co.)
Gã khổng lồ Nhật Bản mang triết lý đồng bộ và Open Bridge.
Công nghệ: Màn hình 8.4-inch cảm ứng. Tương thích "chuẩn không cần chỉnh" với trạm ECDIS JRC Ocean Explorer 3 và VDR JCY-1900 của hãng. Phù hợp cho chủ tàu Nhật hoặc tàu đã dùng full bộ hệ thống buồng lái JRC.
5. Thương hiệu Shanghai Rongde (Mã: RDYB-510)
Rất phổ biến tại thị trường nội địa và các hãng tàu Việt Nam.
Công nghệ: Thiết kế cổ điển với vòng LED Analog kết hợp số kỹ thuật số. Được LR và CCS chứng nhận. Chi phí đầu tư ban đầu thấp, bảo trì sửa chữa dễ kiếm linh kiện thay thế thông qua mạng lưới phân phối rộng.
6. Thương hiệu John Lilley & Gillie (Mã: NT1750 EPR)
Công nghệ: Hợp tác với Navitron, có chứng nhận MED TUV SUD. Sở hữu giao diện tùy biến cho tàu kéo (Escort Tug) hiển thị các dải màu nguy hiểm (Đỏ - Vàng - Xanh) giúp thuyền trưởng tàu kéo phản ứng chớp nhoáng khi dây cáp kéo bị quá căng
PHẦN 7: NHỮNG LƯU Ý KHI CHỌN MUA THIẾT BỊ.
1. Tính tuân thủ pháp lý và chứng chỉ phê duyệt kiểu (Type Approval)
Lưu ý quan trọng nhất khi mua máy đo nghiêng là thiết bị phải đáp ứng hoàn toàn tiêu chuẩn hiệu suất theo Nghị quyết MSC.363(92) của IMO. Bắt đầu từ ngày 01/01/2026, theo sửa đổi SOLAS (Nghị quyết MSC.532(107)), các tàu chở hàng rời và tàu container đóng mới từ 3.000 GT trở lên bắt buộc phải trang bị thiết bị này.
Thiết bị bạn chọn phải có chứng nhận Phê duyệt kiểu (Type Approval) từ các tổ chức Đăng kiểm quốc tế (IACS) hoặc chứng chỉ Wheelmark (MED) của Châu Âu.
Nó cũng phải đáp ứng các tiêu chuẩn thử nghiệm khắc nghiệt về môi trường và tương thích điện từ như IEC 60945, cũng như tiêu chuẩn hiển thị thông tin hàng hải IEC 62288 .
2. Lựa chọn công nghệ cảm biến và độ chính xác
Đừng bao giờ mua các loại máy đo bằng con lắc hoặc bọt thủy cơ học truyền thống cho mục đích kết nối hệ thống, vì chúng có thể sai số lên tới 30% do chịu ảnh hưởng bởi gia tốc vọt tới hoặc dao động ngang của tàu.
Hãy chọn máy đo nghiêng sử dụng công nghệ cảm biến trạng thái rắn MEMS (Micro-Electro-Mechanical Systems) hoặc con quay hồi chuyển có khả năng lọc nhiễu gia tốc động học, giúp cung cấp góc nghiêng tĩnh thực sự.
Thông số đo lường bắt buộc: Thiết bị phải đo được góc nghiêng ngang (heel) và nghiêng dọc (pitch) trong dải ±90 độ, với độ chính xác là ±1 độ hoặc 5% giá trị đọc (tùy giá trị nào lớn hơn). Chu kỳ lắc (roll period) phải đo được trong khoảng từ 4 đến 40 giây, với sai số không quá ±1 giây.
3. Khả năng kết nối và Tích hợp hệ thống (Interfacing)
Máy đo nghiêng điện tử không hoạt động độc lập mà là "trái tim" cung cấp dữ liệu ổn định cho toàn tàu.
Kết nối Hộp đen (VDR): Thiết bị phải có cổng xuất dữ liệu kỹ thuật số chuẩn IEC 61162-1/2 (RS-422/RS-485) để truyền bản tin $HRM (Heel, Roll, Pitch) vào VDR với tần số cập nhật tối thiểu là 5 Hz .
Hệ thống Báo động Buồng lái (BAMS): Phải hỗ trợ truyền nhận các bản tin quản lý báo động chuẩn như $ALC, $ALF, $ACN để hòa mạng vào hệ thống cảnh báo trung tâm.
Cổng ngõ ra vật lý: Nên chọn loại có sẵn các tiếp điểm khô (Relay NO/NC) để có thể đấu nối ra đèn xoay hoặc còi báo động phụ bên ngoài.
4. Đặc tính môi trường và Lắp đặt
Chống chịu thời tiết: Đơn vị cảm biến (Sensor Unit) thường được đặt ở các vị trí dễ bị ẩm, nên cần chọn loại có chuẩn chống nước/bụi cao như IP66, IP67 hoặc IP68. Đơn vị hiển thị (Display Unit) trên buồng lái cần đạt tối thiểu IP22 hoặc IP44.
Khoảng cách an toàn La bàn (Compass Safe Distance): Hãy xem kỹ tài liệu của nhà sản xuất về khoảng cách an toàn đối với la bàn từ chuẩn và la bàn lái (thường từ 0.1m đến 0.25m) để tránh gây lệch từ trường buồng lái khi chọn vị trí lắp đặt.
Nguồn điện: Thiết bị phải được thiết kế để nhận nguồn điện kép 24V DC từ cả nguồn chính (Main) và nguồn sự cố (Emergency/Backup) của tàu, đảm bảo hoạt động liên tục không gián đoạn.
5. Phù hợp với đặc thù loại tàu
Tàu dịch vụ, Tàu kéo (Escort Tugs): Hãy chọn những thiết bị có giao diện hiển thị chuyên dụng cho tàu kéo với các dải màu cảnh báo trực quan (Đỏ/Vàng/Xanh) cho các góc nghiêng nguy hiểm khi lai dắt, đáp ứng các phân cấp đặc biệt như của Bureau Veritas (BV).
Tàu chở dầu/hóa chất, khu vực nguy hiểm: Cần mua các cảm biến đo nghiêng đạt chuẩn phòng nổ Intrinsically Safe (như chuẩn ATEX/IECEx cho Zone 0, 1, 2) nếu lắp đặt tại những khu vực có nguy cơ cháy nổ cao.
6. Giao diện hiển thị và Hãng sản xuất
Màn hình hiển thị nên có kích thước đủ lớn (thường từ 7 inch đến 8.4 inch), tích hợp chức năng làm mờ (Dimming/DDC) cho ca gác đêm và hiển thị rõ ràng cả kim chỉ báo cơ học ảo (analog) lẫn con số điện tử.
Thương hiệu và Dịch vụ hậu mãi: Nên ưu tiên các thương hiệu đã khẳng định được độ tin cậy và có mạng lưới hỗ trợ toàn cầu như Daniamant (DanEI-300), Hoppe Marine, JRC, NSR (NEI-3000), hay Shanghai Rongde. Tại Việt Nam, cần đảm bảo có các đại lý dịch vụ Nav & Comm uy tín để hỗ trợ hiệu chuẩn (Zeroing), bảo trì và đo đạc kỹ thuật khi có yêu cầu từ cơ quan Đăng kiểm.
PHẦN 8: CÂU HỎI THƯỜNG GẶP ( FAQs)
Dưới đây là các câu hỏi thường gặp (FAQs) cùng những giải đáp chi tiết nhất:
Câu hỏi 1: Máy đo nghiêng điện tử khác gì so với máy đo nghiêng quả lắc/bọt thủy truyền thống? Tại sao phải chuyển đổi?
Trả lời: Các thiết bị cơ học truyền thống (như quả lắc hay bọt thủy) hoạt động dựa trên trọng lực vật lý, do đó chúng có nhược điểm chí mạng là không thể phân biệt được giữa trọng lực tĩnh và các gia tốc động học sinh ra khi tàu bị lắc lư, nhấp nhô hay chuyển động ngang do sóng biển 1. Điều này dẫn đến sai số rất lớn, có thể lên tới 30%.Ngược lại, máy đo nghiêng điện tử sử dụng các cảm biến trạng thái rắn (như vi cơ điện tử MEMS) kết hợp với các thuật toán lọc nhiễu phức tạp. Nhờ đó, nó bù trừ được các gia tốc ngang và dọc, cung cấp dữ liệu góc nghiêng tĩnh (heel và pitch) theo thời gian thực với độ chính xác cực cao, thường đạt mức ±0.1 độ.
Câu hỏi 2: Quy định mới nhất của IMO về máy đo nghiêng điện tử là gì? Tàu nào bắt buộc phải lắp đặt?
Trả lời: Để ngăn ngừa tình trạng mất container trên biển và lật tàu hàng rời, IMO đã thông qua Nghị quyết MSC.532(107) nhằm sửa đổi Chương V của Công ước SOLAS.Theo quy định này, bắt buộc phải trang bị máy đo nghiêng điện tử đối với các tàu chở hàng rời (Bulk carriers) và tàu chở container (Containerships) có tổng dung tích từ 3.000 GT trở lên. Quy định này có hiệu lực từ ngày 01/01/2026 và áp dụng cho các tàu đóng mới (keel laid) vào hoặc sau ngày này.
Câu hỏi 3: Đối với các tàu đang khai thác (đóng trước năm 2026), có bắt buộc phải nâng cấp (retrofit) lên máy đo nghiêng điện tử không?
Trả lời: Theo quy định MSC.532(107), luật không áp dụng hồi tố (không bắt buộc) đối với các tàu chở hàng rời và tàu container hiện có (đóng trước 01/01/2026), cũng như các tàu hàng tổng hợp chở container trên boong. Bạn vẫn có thể dùng thiết bị hiện hành.Tuy nhiên, Cục Đăng kiểm và các chuyên gia khuyến cáo: khi thiết bị cũ hỏng cần lắp mới hoặc thay thế, thiết bị thay thế bắt buộc phải tuân thủ yêu cầu trang bị loại điện tử. Thực tế, nhiều chủ tàu cũng chủ động nâng cấp vì nó giúp tối ưu hóa việc xếp dỡ hàng, tiết kiệm nhiên liệu và tăng cường an toàn sinh mạng.
Câu hỏi 4: Ngoài góc nghiêng, hệ thống này còn đo lường và cung cấp những thông số quan trọng nào khác?
Trả lời: Một máy đo nghiêng điện tử chuẩn IMO không chỉ đo góc mà phải cung cấp đủ các thông số động lực học sau:
Góc nghiêng ngang (Heel Angle) và Góc nghiêng dọc (Pitch Angle).
Biên độ lắc (Roll Amplitude): Giá trị góc nghiêng lớn nhất về phía mạn trái hoặc mạn phải.
Chu kỳ lắc (Roll Period): Khoảng thời gian (tính bằng giây) giữa hai giá trị góc nghiêng tối đa liên tiếp ở cùng một mạn. Hệ thống phải đo được chu kỳ này trong dải từ 4 đến 40 giây.
Chu kỳ lắc và biên độ lắc là hai tham số "sinh tử" để thuyền trưởng đánh giá độ ổn định của thân tàu, giúp phát hiện sớm hiện tượng lắc cộng hưởng (parametric roll) vô cùng nguy hiểm.
Câu hỏi 5: Tiêu chuẩn kỹ thuật và độ chính xác bắt buộc theo chuẩn IMO là bao nhiêu?
Trả lời: Mọi thiết bị phải đạt chứng chỉ phê duyệt kiểu (Type Approval) thỏa mãn tiêu chuẩn hiệu suất MSC.363(92). Cụ thể:
Về độ chính xác: Sai số của góc nghiêng không được vượt quá ±1 độ hoặc 5% giá trị đọc (lấy giá trị nào lớn hơn). Sai số của thời gian (chu kỳ lắc) không vượt quá ±1 giây hoặc 5%.
Về tính ổn định: Thiết bị không được suy giảm độ chính xác khi chịu các chuyển động vọt tới, nhấp nhô hay gia tốc ngang từ -0.8 g đến +0.8 g.
Về xuất dữ liệu: Phải truyền dữ liệu góc nghiêng tức thời vào Hộp đen (VDR) của tàu với tần số cập nhật ít nhất là 5 Hz (5 lần/giây).
Câu hỏi 6: Khi tiến hành lắp đặt (Installation) cảm biến đo nghiêng, kỹ sư cần đặc biệt lưu ý nguyên tắc nào để tránh sai số?
Trả lời: Từ kinh nghiệm thực chiến của tôi, việc lắp đặt cảm biến (Sensor Unit) quyết định đến 90% sự thành bại:
Vị trí lắp đặt: Cảm biến phải được gắn chặt trên một bề mặt nằm ngang, mũi cảm biến song song tuyệt đối với trục dọc (Centerline) của tàu.
Khoảng cách đến tâm quay: Phải đặt cảm biến càng gần trọng tâm hoặc tâm lắc (Roll Center) của tàu càng tốt. Tuyệt đối không lắp ở các vị trí quá cao (như đỉnh cột buồm) hoặc quá xa về phía mũi/đuôi, vì gia tốc ly tâm và tiếp tuyến sẽ sinh ra nhiễu lớn làm sai lệch kết quả đo góc tĩnh.
Giữ khoảng cách an toàn la bàn: Cần xem tài liệu hãng để giữ khoảng cách an toàn (Compass safe distance) với la bàn từ (thường từ 0.1m - 0.25m) để tránh gây lệch từ trường.
Hiệu chuẩn Điểm không (Zeroing/Calibration): Sau khi lắp, phải cho máy ổn định nhiệt rồi tiến hành hiệu chuẩn cài đặt gốc 0 (zero) trong điều kiện tàu nằm ở vùng nước tĩnh lặng, cân bằng (ví dụ: trong ụ khô).
Câu hỏi 7: Máy đo nghiêng điện tử giao tiếp với các hệ thống nào trên trạm buồng lái (Bridge)?
Trả lời: Thiết bị này đóng vai trò là một "mắt xích" cung cấp dữ liệu số (Digital Interface) quan trọng. Thông qua các cổng Serial RS-422/485 (chuẩn IEC 61162-1/2) hoặc Ethernet, nó giao tiếp chủ yếu với:
Hộp đen (VDR): Gửi các bản tin chuẩn (như $HRM) liên tục để lưu trữ dữ liệu điều tra.
Hệ thống quản lý báo động buồng lái (BAMS): Để truyền lệnh báo động (ALC, ALF) khi tàu nghiêng quá ngưỡng nguy hiểm cài đặt trước.
Ngoài ra nó còn có các rơ-le tiếp điểm khô (Dry contact) để kích hoạt trực tiếp còi hoặc đèn chớp vật lý bên ngoài khi có sự cố hệ thống hoặc mất nguồn.
Hy vọng những giải đáp trên sẽ giúp bạn có cái nhìn rõ ràng nhất về mặt kỹ thuật, lắp đặt và quy định pháp lý của dòng thiết bị sinh tử này
















.png)




