







Định Vị Vệ Tinh Tàu Biển: Giải Pháp Hàng Hải -MarineZone
Định Vị Vệ Tinh Tàu Biển: Vai Trò Và Tầm Quan Trọng Trong Hàng Hải
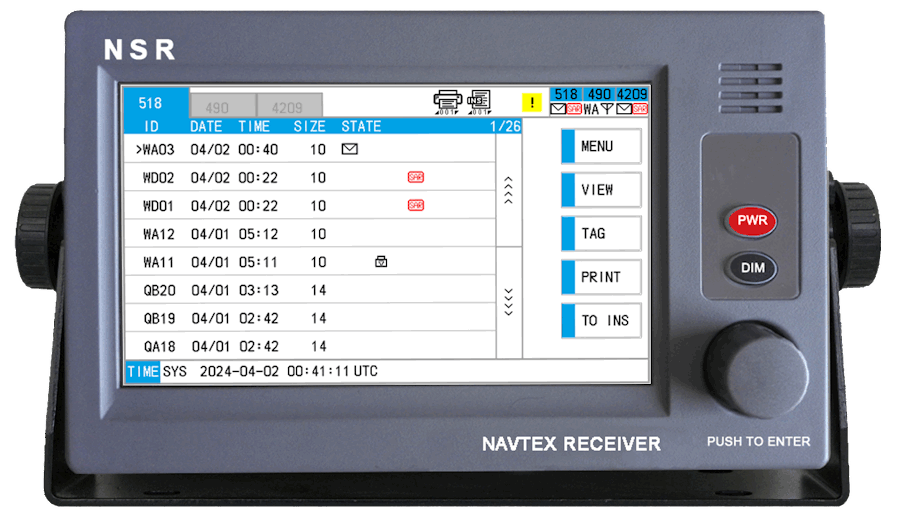
Định vị vệ tinh tàu biển không chỉ đơn thuần là công nghệ xác định vị trí mà còn là nền tảng thiết yếu cho toàn bộ hệ thống dẫn đường và an toàn hàng hải. Hệ thống này cung cấp dữ liệu định vị, dẫn đường và thời gian (PNT) cho các thiết bị điện tử trên tàu như Radar, ECDIS (Electronic Chart Display and Information System) và AIS (Automatic Identification System). Việc đảm bảo độ chính xác và tính liên tục của dữ liệu định vị vệ tinh là yếu tố sống còn giúp tàu vận hành an toàn, tránh va chạm và tuân thủ các quy định quốc tế nghiêm ngặt như IMO và SOLAS.
.png)
Ứng Dụng Công Nghệ Đa Chòm Sao Trong Định Vị Vệ Tinh Tàu Biển
Trong thực tế, nhiều chủ tàu và kỹ sư vẫn nhầm lẫn giữa định vị vệ tinh và GPS, trong khi GPS chỉ là một trong các hệ thống vệ tinh toàn cầu. Để tối ưu hóa độ chính xác và độ tin cậy, hệ thống định vị vệ tinh tàu biển hiện đại phải khai thác đa chòm sao (Multi-constellation GNSS), bao gồm:
- GPS của Hoa Kỳ
- GLONASS của Nga
- Galileo của Châu Âu
- BeiDou của Trung Quốc
Việc thu nhận đồng thời tín hiệu từ nhiều hệ vệ tinh giúp tăng số lượng vệ tinh quan sát được, giảm hệ số suy giảm độ chính xác hình học (HDOP) xuống dưới 4.0, đảm bảo sai số vị trí dưới 10 mét trong 95% thời gian hành hải. Điều này đặc biệt quan trọng khi tàu di chuyển vào các khu vực cảng biển có cấu trúc che khuất hoặc điều kiện thời tiết khắc nghiệt.
Tiêu Chuẩn Thiết Bị Định Vị Vệ Tinh Tàu Biển Theo IMO Và IEC
Thiết bị định vị vệ tinh tàu biển phải tuân thủ các tiêu chuẩn kỹ thuật nghiêm ngặt để đảm bảo hoạt động ổn định trong môi trường biển khắc nghiệt. Các tiêu chuẩn quan trọng bao gồm:
- IMO MSC.112(73): Yêu cầu thiết bị xuất dữ liệu tọa độ với độ phân giải tối thiểu 0,001 phút và cập nhật vị trí ít nhất mỗi 2 giây.
- IEC 60945: Tiêu chuẩn kiểm tra môi trường hàng hải, bao gồm khả năng chịu sương muối, rung chấn, và chống ngâm nước với chuẩn IPX7/IPX8.
- Chứng nhận đăng kiểm: Thiết bị phải có dấu Wheelmark của DNV hoặc chứng nhận CCS để đảm bảo chất lượng và độ tin cậy.
Một tính năng quan trọng không thể thiếu là Giám sát Tính Toàn vẹn Tự chủ (RAIM), giúp đánh giá độ tin cậy của tín hiệu vệ tinh và kích hoạt cảnh báo trong vòng 5 giây nếu phát hiện sai số vượt mức an toàn hoặc HDOP vượt ngưỡng.
Phương Pháp Khắc Phục Sai Số Và Nhiễu Trong Định Vị Vệ Tinh Tàu Biển
Tín hiệu vệ tinh truyền từ quỹ đạo xuống mặt đất rất yếu, chỉ khoảng -130 dBm, dễ bị ảnh hưởng bởi các yếu tố môi trường như tầng điện ly, tầng đối lưu, hoặc các thiết bị gây nhiễu sóng (jamming). Ngoài ra, hiện tượng nhiễu đa đường (multipath) do sóng vô tuyến phản xạ từ mặt nước hoặc cấu trúc kim loại trên tàu cũng làm sai lệch kết quả định vị.
Để giảm thiểu sai số này, kỹ thuật định vị vệ tinh tàu biển áp dụng các công nghệ sau:
- Định vị vi sai (DGPS): Thiết bị nhận bản tin hiệu chỉnh từ các trạm hải đăng ven bờ ở dải tần 283,5 - 325 kHz, giúp giảm sai số xuống còn 1-3 mét.
- Hệ thống tăng cường qua vệ tinh (SBAS): Khi tàu di chuyển ra xa khỏi vùng phủ sóng của trạm bờ, thiết bị chuyển sang nhận tín hiệu hiệu chỉnh từ các vệ tinh địa tĩnh như WAAS, EGNOS, GAGAN hoặc MSAS, duy trì độ chính xác cao và cảnh báo tính toàn vẹn tín hiệu.
Khuyến Nghị Kỹ Thuật Khi Lắp Đặt Hệ Thống Định Vị Vệ Tinh Tàu Biển
Việc lắp đặt và đấu nối hệ thống định vị vệ tinh tàu biển đòi hỏi sự chính xác và tuân thủ các nguyên tắc kỹ thuật để đảm bảo hiệu suất tối ưu:
- Vị trí anten: Anten phải được đặt ở vị trí cao nhất, có tầm nhìn thoáng, tránh bị che khuất bởi cấu trúc tàu hoặc búp sóng của Radar. Khoảng cách với anten VHF/UHF cũng cần được duy trì để tránh nhiễu sóng hài.
- Đồng bộ dữ liệu NMEA 0183/2000: Thiết bị định vị vệ tinh cung cấp dữ liệu cho các hệ thống như ECDIS, Radar thông qua chuẩn NMEA. Cần lựa chọn các bản tin đầu ra phù hợp và điều chỉnh tốc độ baudrate (tối thiểu 38400 bps cho thiết bị hiện đại) để tránh quá tải băng thông và mất gói tin.
- Tiếp địa và chống nhiễu: Dây tiếp địa vỏ máy phải được bắt chặt xuống thân tàu để giảm thiểu nhiễu điện từ (EMI), đảm bảo tín hiệu định vị ổn định.
Định Vị Vệ Tinh Tàu Biển Và An Toàn Hàng Hải
Hệ thống định vị vệ tinh tàu biển không chỉ phục vụ mục đích định vị mà còn là chốt chặn cuối cùng bảo vệ sinh mạng thuyền viên và tài sản hàng chục triệu đô la. Việc trang bị và chuẩn hóa hệ thống theo tiêu chuẩn quốc tế giúp tàu vượt qua các kỳ kiểm tra khắt khe của Port State Control (PSC) và các cơ quan đăng kiểm. Đồng thời, nó giảm thiểu rủi ro mất tín hiệu định vị (Loss of Position) gây ra cảnh báo liên tục hoặc lưu giữ tàu tại cảng.
Những kỹ thuật và khuyến nghị thực chiến trong việc lựa chọn, lắp đặt và vận hành hệ thống định vị vệ tinh tàu biển đóng vai trò then chốt trong việc duy trì hoạt động an toàn và hiệu quả trên biển, góp phần nâng cao chất lượng quản lý và vận hành tàu theo chuẩn IMO/SOLAS.
>>> Bạn có thể tham khảo thêm về Định vị vệ tinh tàu biển đạt chứng chỉ Đăng Kiểm DNV, VR. Chi tiết model NGR-3000
Cảm ơn bạn đã đọc bài,
Nếu bạn cần hỗ trợ thêm, xin liên hệ với chúng tôi theo :
Thông tin liên hệ và kết nối
MarineZone
Địa chỉ: Số 144, tổ 6, phường Phú Diễn, Hà Nội
Điện thoại/Zalo: 0865.085.436
Website: marinezone.vn
Các mạng xã hội chính thức:
















.png)




